

Bonjour,
Tout d'abord excusez-moi pour mes connaissances scolaires anciennes en électronique...
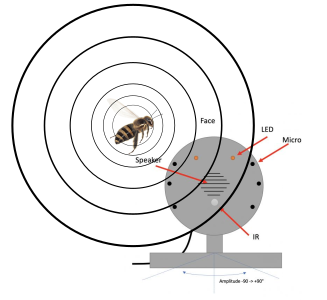
Mon projet : un appareil, inamovible, qui suit du "regard" un objet volant qui émet un bruit.
La vitesse des objets observé : < 1m/s
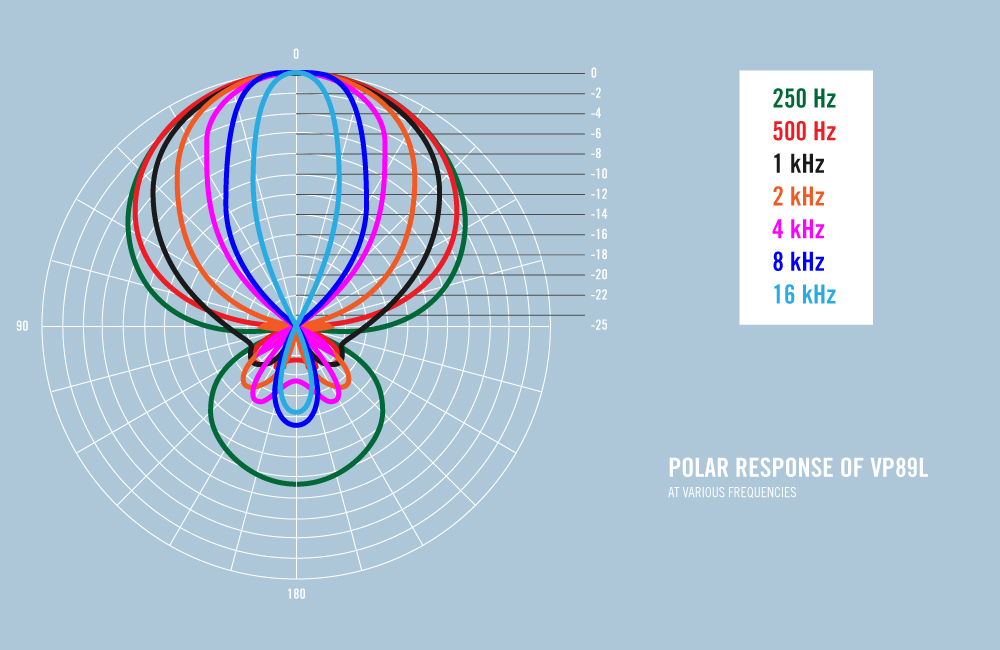
La fréquence du son continu : entre 200Hz et 2KHz
Distance des objets : 0 à 5m
Amplitude du bruit : très faible (bruit d'une mouche)
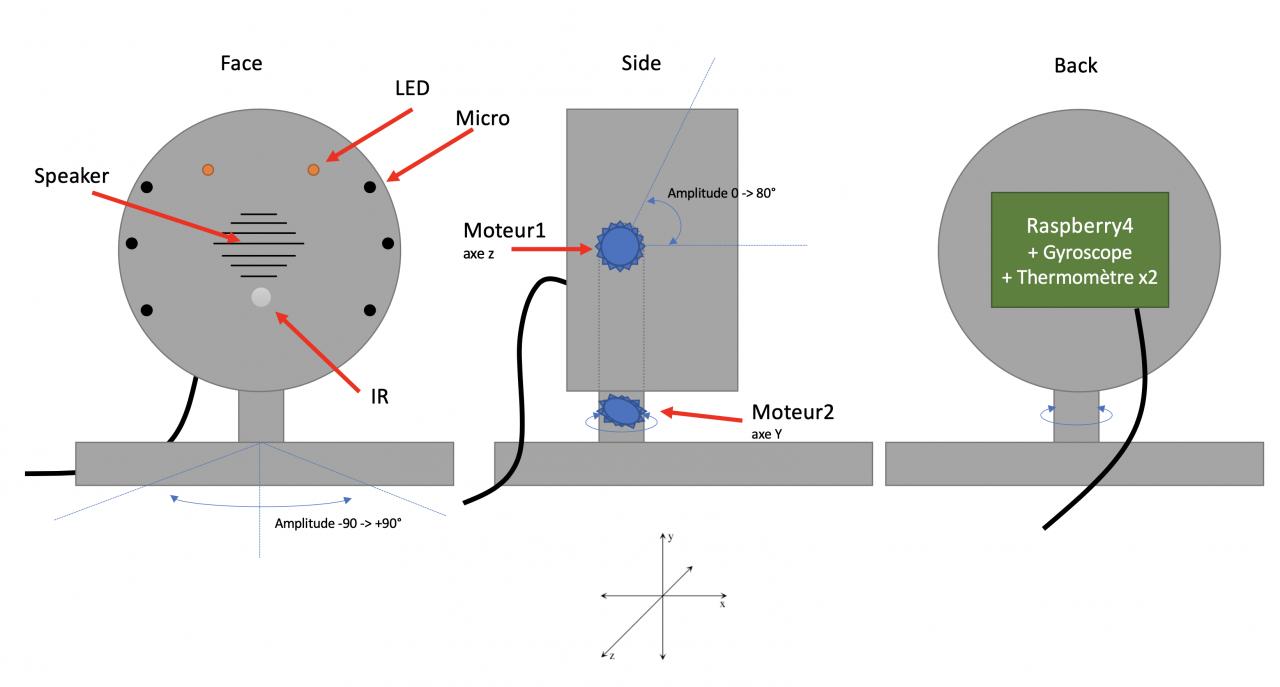
L'appareil serait inamovible, mais la tête sur laquelle sont fixés les sondes peut bouger.
Je passerais surement par un dispositif de Raspberry pour la coordination sensor -> tracknig (moteurs de la tête). Mais mon inquiétude est au niveau des micros, car je suis informaticien, et la partie analogique/électronique nest pas mon point fort.
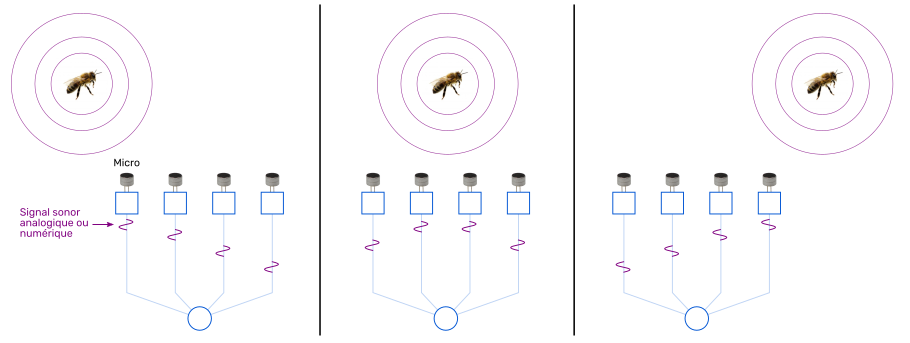
J'ai bien trouvé des micros capables de fonctionner à ces fréquences, mais qui n'offrent pas de passe bande.
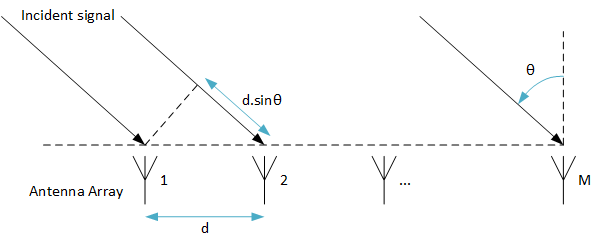
Le circuit (désolé pour le formalisme) suivrait le schéma suivant : micros sensibles x2 (ou x3) -> son(fréquence, amplitude) --> passe bande --> ampli -> transformation analogique/numérique -> Raspberry(code, analyse) -> ajustement position tête via robot
Ma question : savez-vous s'il existe des kits pour faire la chaine son->numérique, ou avez-vous connaissance de projet similaire ou pouvez-vous me conseiller sur les composants ?
PS : je suis gère une startup qui a d'autres activités informatiques, et ce projet un peu "disruptif" a une application très prometteuse.
PS: Même si j'irai jusqu'au bout de ce projet, le potentiel financement d'aide d'ingénieur en électronique m'interdit de mettre ce message dans la section "projet" de Futura.
Cordialement,
Fabrice
-----



 . C'est super intéressant mais il faut s'accrocher. En ce moment mon cerveau se remet d'une luxation
. C'est super intéressant mais il faut s'accrocher. En ce moment mon cerveau se remet d'une luxation