

Bonjour,
Dans le cadre de notre projet PPE de Terminale SI nous sommes amenés à diriger un robot avec un joystick (de manette de PS1).
Le robot est constitué de deux motoréducteurs devant se déplacer sur un plan incliné à 10° (cahier des charges pas encore précisé)
Comment optimiser l'utilisation du joystick avec un robot à deux motoréducteurs ?
En espérant une réponse de votre part, merci.
Répondre à la discussion
Affichage des résultats 1 à 19 sur 19
manette robot
Vue hybride
- 01/10/2008, 15h44 #1invite262308ad

manette robot
- 01/10/2008, 17h18 #2invite936c567e
Re : manette robot
Bonjour
J'imagine que les motoréducteurs sont montés l'un sur une roue motrice à droite, l'autre sur une roue motrice à gauche.
Le robot doit donc pouvoir se piloter comme un char à chenille, ce qui est assez simple.
En revanche, du côté du joystick, je ne sais pas de quel modèle il peut s'agir, ni si l'appareil peut être démonté ou s'il doit être utilisé tel quel (au travers de son bus série synchrone). Pour rappel, les différents modèles possibles sont:
 Premier modèle disponible
Premier modèle disponible
 Modèle "Dual Analog"
Modèle "Dual Analog"
 Modèle "DualShock"
Modèle "DualShock"
J'attends tes précisions, parce que la commande ne sera pas la même selon le cas.
- 01/10/2008, 17h33 #3invite936c567e
Re : manette robot
Si le joystick doit être utilisé tel quel, il faudra mettre en oeuvre un microcontrôleur ou un circuit logique assez fourni pour le faire fonctionner et commander numériquement les moteurs.
Dans ce cas, des informations intéressantes peuvent être trouvées par ici.
- 02/10/2008, 16h46 #4invite262308ad
Re : manette robot
en fait nous voulons contrôler le robot a l'aide d'un seul joystick
le modèle de la manette est "dualshock" je crois, en tout cas elle y ressemble comme 2 goutes d'eau
c'est en fait 2 potentiomètres croisés qui font à eux deux un joystick
Nous pension démonter le potentiomètre ou dériver les connexions afin de ne pas utiliser la liaison vers la "playstation" car plus simple pour nous.
donc quelle technologie serait la plus adapté pour ce contrôle:
-pics avec programme
-ensemble de composants
-autres
merci de répondre
- Aujourd'huiA voir en vidéo sur Futura
- 02/10/2008, 17h16 #5invite936c567e
Re : manette robot
Si la transmission de la commande doit se faire de manière analogique (tension réglable ou PWM par câble électrique ou par liaison radio), l'utilisation directe des potentiomètres et la mise en oeuvre de circuits analogiques courants (amplis op, etc.) paraît être la solution la plus simple.
En revanche, si la commande est numérique ou que le système utilise déjà par ailleurs un système informatisé (microcontrôleur) il pourrait être plus sage de garder le joystick Playstation dans son intégralité, et de lire l'état de la manette puis de calculer la commande à envoyer au moteur par programme. On passe alors d'un projet électronique à un projet à dominante informatique.
- 03/10/2008, 17h47 #6invite262308ad
Re : manette robot
la commande analogique ayant été déconseillées par les promotions précédentes(robot inconduisible qui part dans tout les sens ou qui a toujours tendance a vire plus sur un coté que sur l'autre
 ) ainsi que les professeurs nous allons opter pour la commande numérique.
) ainsi que les professeurs nous allons opter pour la commande numérique.
la programmation faisant partie du programme scolaire il n'y a pas de problème pour la dominante informatique
il faut utiliser quel langage de programmation pour pouvoir faire un programme comme tu le dit
un algorigramme peut-il suffire
au lycée on utilise plutôt "flowcode" comme logiciel pour programmer et il faut tout de même que le programme reste accessible a notre niveau
- 03/10/2008, 18h40 #7invite936c567e
Re : manette robot
Si le robot s'avérait incontrôlable avec une commande analogique, c'est : Envoyé par SI robot
Envoyé par SI robot 
- que cette commande analogique était mal conçue, et alors il ne faudrait pas reproduire les mêmes défauts en numérique,
- que la motorisation du robot posait problème, et alors ceux-ci ne pourront pas non plus être résolus avec une commande numérique si on garde cette motorisation telle quelle (si un être humain ne peut pas diriger correctement le robot, un microcontrôleur aveugle et peu intelligent risque encore moins d'y parvenir dans les mêmes conditions),
- ou les deux en même temps.
Parmi les causes courantes d'échec, on peut citer, concernant le premier point:
- l'absence d'une zone morte au niveau de la position neutre (centrale) des potentiomètres, qui interdit l'arrêt total des moteur et la possibilité de rouler parfaitement droit
- une mauvaise stabilité du zéro, induisant une dérive incontrôlée de la position neutre
- une trop grande sensibilité ou réactivité des commandes, à rapprocher d'un manque de pratique de la part du pilote
Et concernant le second point:
- une dissymétrie des caractéristiques électriques et/ou mécaniques entre les deux systèmes roues-motoréducteurs droit et gauche
- la variation erratique de ces caractéristiques au cours du fonctionnement (due à un problème de qualité de fabrication, notamment)
- l'absence d'asservissement de la vitesse des roues à la consigne issue de la commande
Va pour la commande numérique... Envoyé par SI robot
Pour décrire ce que doit faire le programme, tous les types de langages, y compris le français et les « algorigrammes», peuvent convenir. Envoyé par SI robot
En revanche, au moment de la réalisation, il faudra utiliser un langage disponible sur la plateforme de développement du microcontrôleur. C'est généralement un langage Assembleur ou le langage C, plus rarement le langage Java, le langage Basic, ou autre....
Je ne connais pas trop Flowcode, ni ses différentes versions, ni ses possibilités réelles. Envoyé par SI robot
Il convient d'une part de vérifier qu'il pourra effectivement générer des programmes pour le microcontrôleur qui sera utilisé.
D'autre part, comme c'est un langage graphique qui utilise des «macros», il faut vérifier que les «macros» nécessaires existent déjà, ou bien qu'il sera possible d'en créer de nouvelles adaptées au besoin du projet.
- 06/10/2008, 09h36 #8invite262308ad
Re : manette robot
bonjour
désolé de ne pas avoir repondu avant mais j'ai pas eu le temps
Je pensais codé l'information analogique issue du potentiometre du joystick en information numérique, l'envoyé au microcontrôleur(16F87...(me rappel plus )) par le biais des plusieurs bits et ensuite de crée plusieurs équations dans le programme.
)) par le biais des plusieurs bits et ensuite de crée plusieurs équations dans le programme.
Leur résultat correspondrait a la manière d'alimenter les moteurs mais je sais pas trop quel codeur utiliser (je voudrais diviser le potentiomètre en une dizaine de parties) le programme c'est pas un problème et aussi comment faire varier la vitesse des moteur en utilisant les hacheurs
en éspérant avoir été clair
merci pour la réponse
- 06/10/2008, 10h01 #9invite936c567e
Re : manette robot
Comme je l'indiquais, cette partie-là existe déjà dans l'électronique du joystick. Le fait d'utiliser un microcontrôleur permet d'aller lire directement ces informations en numérique. Envoyé par SI robot
Les informations trouvées sur ce site web sont suffisantes pour y parvenir.
C'est effectivement ce qu'il faut faire. Envoyé par SI robot
Normalement, on se contente de distinguer 3 zones par axe du joystick (dont une zone neutre centrale), mais on peut monter à 5. Aller jusqu'à 10 me paraît beaucoup. Envoyé par SI robot
Tout dépend des choix que tu feras dans: Envoyé par SI robot
- la transmission des consignes de vitesse du microcontrôleur vers les hacheurs (distance ? analogique ou numérique ?)
- le type de hacheur (commandé en tension ou PWM ?)
- la manière dont l'asservissement en vitesse est réalisé
Concernant le dernier point, je rappelle qu'il est crucial si la vitesse des moteurs était incontrôlable dans les précédents projets. Il ne s'agirait pas de reproduire le même problème, peut-être même en pire.
.
- 06/10/2008, 20h25 #10invite262308ad
Re : manette robot
voila comment je pensais "découper" le joystick qui sera peut être en fait un joystick d'ordinateur car plus facile à manipuler
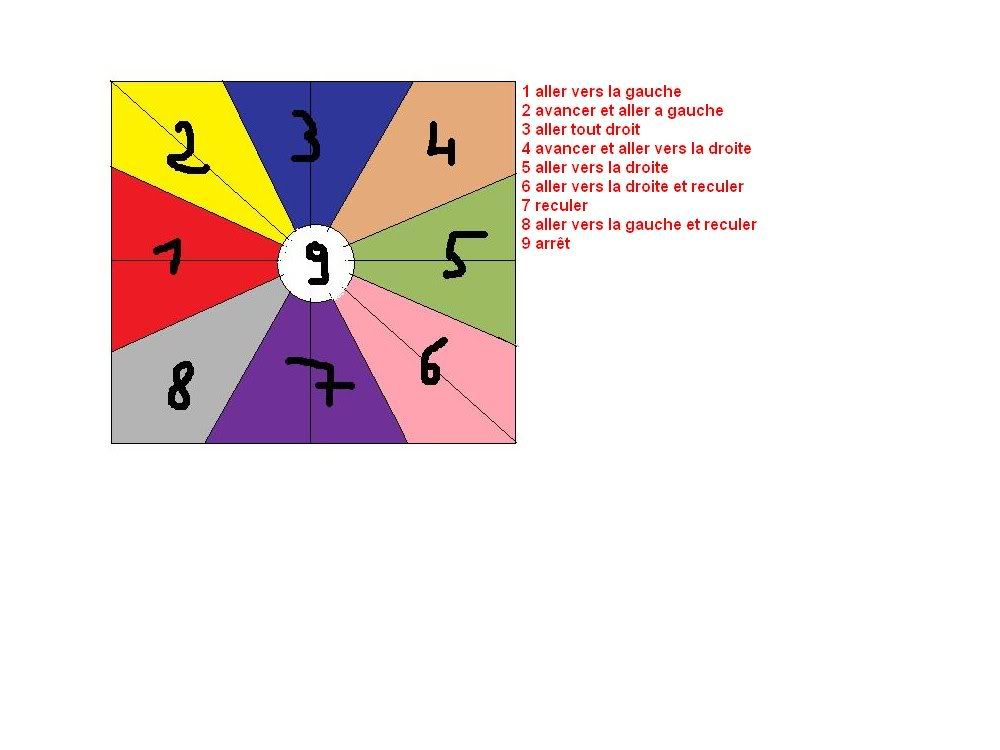
la vitesse peut être géré par un potentiomètre linéaire qui se trouve a coté du joystick

qu'en pense tu ?
un joystick est composé de 2 potentiomètres croisée je ne crois pas que l'information issue des potentiomètres soit numérique sur un joystick d'ordinateur donc quel composant utiliser pour coder l'information
- 06/10/2008, 22h29 #11invite936c567e
Re : manette robot
L'utilisation d'un joystick est généralement guidé par le besoin de faire une commande proportionnelle sur deux axes. On fixe une zone neutre centrale seulement pour garantir le point mort, qui sinon est difficile à obtenir avec ce type de dispositif. Le joystick permet à lui seul de fixer à la fois la vitesse et la direction. Envoyé par SI robot
Le fait de découper les zones tel que tu l'as fait et d'y associer un réglage de vitesse séparé ne justifie plus du tout le recours à un joystick. De simples boutons ou un simple pad à contacts serait amplement suffisant, garantirait le même fonctionnement et mèneraient à une réalisation infiniment plus simple.
Comme je l'ai déjà indiqué, et comme peut le confirmer le site dont j'ai donné le lien, les joysticks de la Playstation fournissent des sorties numériques sur un bus série synchrone. Envoyé par SI robot
Même les vieux joysticks pour PC avaient un sortie PWM, et non analogique. Quant aux modèles plus récents, ils ont tous une interface USB.
Dans tous les cas, il n'y a plus besoin d'avoir recours à un convertisseur A/N. Il faut un microcontrôleur avec des entrées/sorties numériques.
- 07/10/2008, 09h41 #12invite262308ad
Re : manette robot
bonjour merci d'avoir répondu
en fait je pensais que ça allait être vachement compliqué de combiner la vitesse et le déplacement sur le joystick voila pourquoi je pensais le faire séparément. Tu as l'air de dire que ce n'est pas si compliqué que ça donc si tu pouvais me donner des références de pics ayant des entrées numériques et comment récupéré les informations issues du joystick aussi bien que des boutons du joystick (ils serviront pour d'autres fonctions du robot) .
Le problème de la vitesse se pose donc de nouveau, alors quel "chose" faut il ajouter au programme pour prendre en compte l'inclinaison du joystick donc de faire changer la vitesse du robot (c'est quoi le PWM[j'en ai déjà entendu parler pour des ventilateurs de PC]) donc voila si tu pouvais m'aider (pas cool tu es le seul a répondre a mes questions pourquoi les autres viennent pas
(c'est quoi le PWM[j'en ai déjà entendu parler pour des ventilateurs de PC]) donc voila si tu pouvais m'aider (pas cool tu es le seul a répondre a mes questions pourquoi les autres viennent pas merci quand même de m'aider)
merci quand même de m'aider)
- 07/10/2008, 10h42 #13invite936c567e
Re : manette robot
Tous les PICs ont des entrées numériques. C'est un minimum. Envoyé par SI robot
J'ai déjà donné plusieurs fois le lien vers cette information. Envoyé par SI robot
L'inclinaison du joystick vers l'avant donne une valeur d'autant plus grande que l'inclinaison est importante. Cette valeur peut représenter directement la tension à appliquer aux moteurs, laquelle fixe leur vitesse (pour un couple résistif donné), ou bien la consigne de vitesse à appliquer au système d'asservissement des moteurs. Envoyé par SI robot
L'inclinaison du joystick vers l'arrière correspond à des vitesses négatives (marche arrière).
L'inclinaison du joystick sur le côté correspond à une dissymétrie des vitesses entre les deux moteurs, et fait tourner le robot.
PWM = Pulse Width Modulation = modulation de largeur d'impulsion Envoyé par SI robot
C'est un type de codage qui permet de transmettre une valeur analogique sous la forme d'un signal logique tout-ou-rien. Le signal est constitué d'impulsions périodique de largeur d'autant plus grande (i.e. de rapport cyclique d'autant plus élevé) que la valeur à transmettre est importante. La valeur moyenne du signal, constitué de seulement deux niveaux possibles 0 et 1, donne la valeur analogique transmise.
Cela permet de n'utiliser que des circuits numériques pendant la transmission, et de rendre le signal moins sensible aux perturbations.
- 07/10/2008, 12h24 #14invite262308ad
Re : manette robot
rebonjour
En fait le lien que tu donnes est plutôt pour la manette de playstation et non pour le joystick d'ordinateur.(a moins que ce soit traité et que je ne comprennes pas assez bien l'anglais)
Je pense pas utiliser la liaison USB pour communiquer avec le microcontrôleur donc est-ce toujours possible
je garde donc mon pic 16F8...
pour les boutons du joystick c'est réglé(j'en ai démonté un et ce sont des boutons simples))L'inclinaison du joystick vers l'avant donne une valeur d'autant plus grande que l'inclinaison est importante. Cette valeur peut représenter directement la tension à appliquer aux moteurs, laquelle fixe leur vitesse (pour un couple résistif donné), ou bien la consigne de vitesse à appliquer au système d'asservissement des moteurs.
L'inclinaison du joystick vers l'arrière correspond à des vitesses négatives (marche arrière).
L'inclinaison du joystick sur le côté correspond à une dissymétrie des vitesses entre les deux moteurs, et fait tourner le robot.
quand on incline le joystick complètement vers la gauche (ou la droite) il faut une dissymétrie et un vitesse maximum pour tourner vite
Je trouve que c'est un peu prise de tête
- 07/10/2008, 12h57 #15invite936c567e
Re : manette robot
C'est toi qui a parlé de manette de PS1 (=Playstation 1). Envoyé par SI robot
C'est pourtant bien ce que tu demandais, non ? Envoyé par SI robot
- 07/10/2008, 16h51 #16invite262308ad
Re : manette robot
désolé t'avait pas dû voire
le joystick qui sera peut être en fait un joystick d'ordinateur
- 07/10/2008, 17h14 #17invite262308ad
Re : manette robot
en fait c'est sûre on va utiliser un joystick d'ordinateur (juste la partie matériel pas le bus USB)
- 06/02/2009, 14h44 #18inviteaa28d196

Joystick
salut
Ce n'est pas une reponse a votre question. mais une question: Merci.
J'aimerai savoir comment faire pour piloter un Moteur Brushless (la PWM) avec un Joystick industrial a 3 fils.
Merci
- 07/02/2009, 10h47 #19invite262308ad
Re : manette robot
Ton joystick doit en fait être un simple potentiomètre circulaire, les deux fils extrême servent a l'alimentation et le fils du milieu sert a récupérer l'information,ici une tension variable qui varie entre 0 et 5 volts si tu alimente ton potentiomètre en 5 volts. Cette tension varie en fonction de la position du joystick.
le mieux est de raccorder ce fil (information analogique) a une entrée analogique d'un pic type 16F876(ou autre) en suite par le biais du programme tu dis au pic ce qu'il faut qu'il fasse en fonction de cette information. Lui il sortira le PWM sur une des ses broches (différent selon les pics).
En fait le PWM c'est uniquement géré par programmation su les pics, après je suis pas un pro de l'électronique donc il y a peu être d'autres méthode pour commander ton moteur
Au fait ton joystick a combien d'axes (seulement 3 fils ou plus)?
J'espère avoir été clair si c'est pas le cas repose une question
Discussions similaires
-
Schéma manette playstation
Par invite0a2fcf7a dans le forum ÉlectroniqueRéponses: 2Dernier message: 25/01/2008, 19h58 -
Comment brancher une manette sur un robot
Par invite33235612 dans le forum ÉlectroniqueRéponses: 3Dernier message: 12/04/2007, 17h41 -
manette sans fil ????
Par invitec3854f35 dans le forum TPE / TIPE et autres travauxRéponses: 1Dernier message: 21/01/2007, 15h53 -
Probleme installation manette 8 boutons
Par invitedf839716 dans le forum Matériel - HardwareRéponses: 2Dernier message: 13/01/2004, 17h41 -
manette port jeu : hepl
Par invite8e6b42f1 dans le forum ÉlectroniqueRéponses: 13Dernier message: 07/07/2003, 13h52