


Bonjour ,
j'ai un moteur pas à pas très ancien "SANYO DEBKI" ,il est ecrit sur sa plaque " 4.8A-1.8V-1.8°c" et avec six files noir ,rouge ,blanc,rouge-blanc,vert,vert-blanc
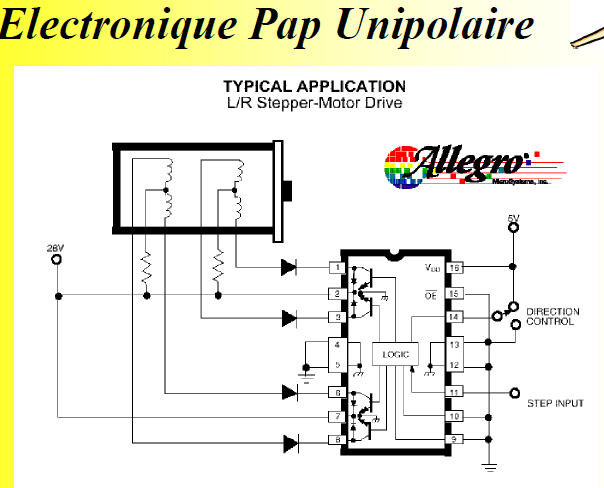
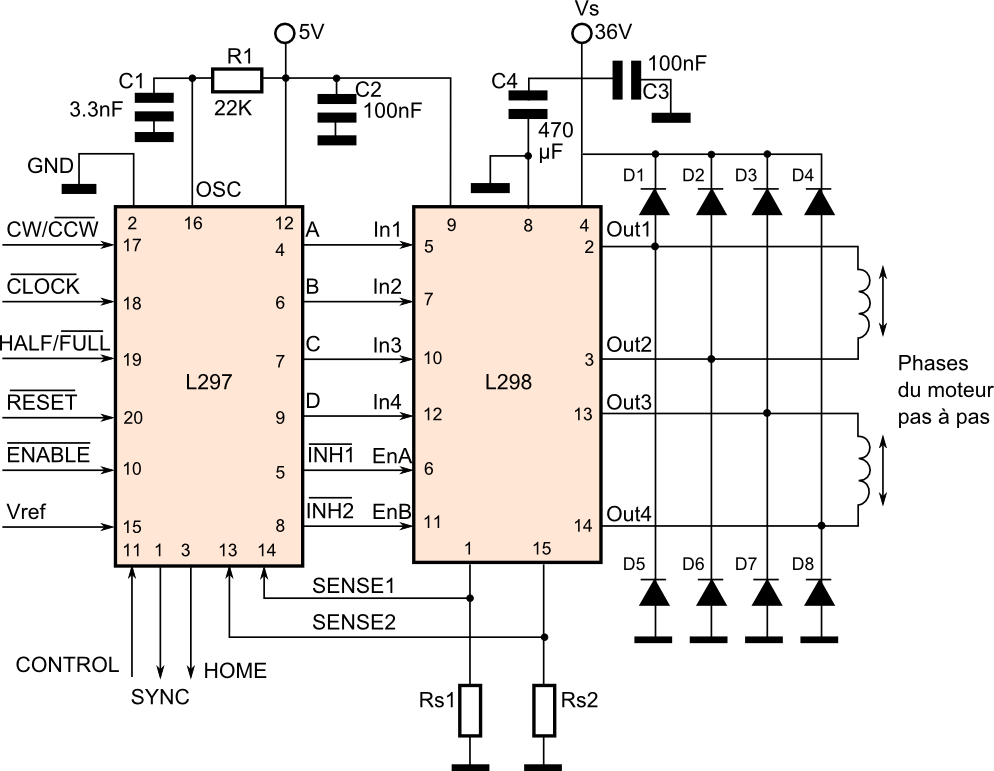
;les circuits que j'ai : un L298N,L297,diode 1N4007,L7812 ,Condo,est une alimentation stabilisé
est qu'il y a quelqu'un peut m'aider à réaliser le câblage ?
-----

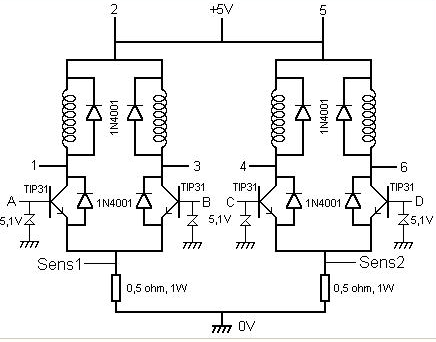
 et bien en fait c'est pas très important, un unipolaire peut fonctionner comme un bipolaire , ne pas connecter le point milieu de chaque bobinage ^^ le courant reste le même , suffit de doubler la tension .
et bien en fait c'est pas très important, un unipolaire peut fonctionner comme un bipolaire , ne pas connecter le point milieu de chaque bobinage ^^ le courant reste le même , suffit de doubler la tension .




{kind=link}
{kind=link}
{kind=link}