Bonjour à tous,
Fan d'électronique arduino, j'aimerai avoir un peu d'aide sur un de mes projets.
Pour faire simple :
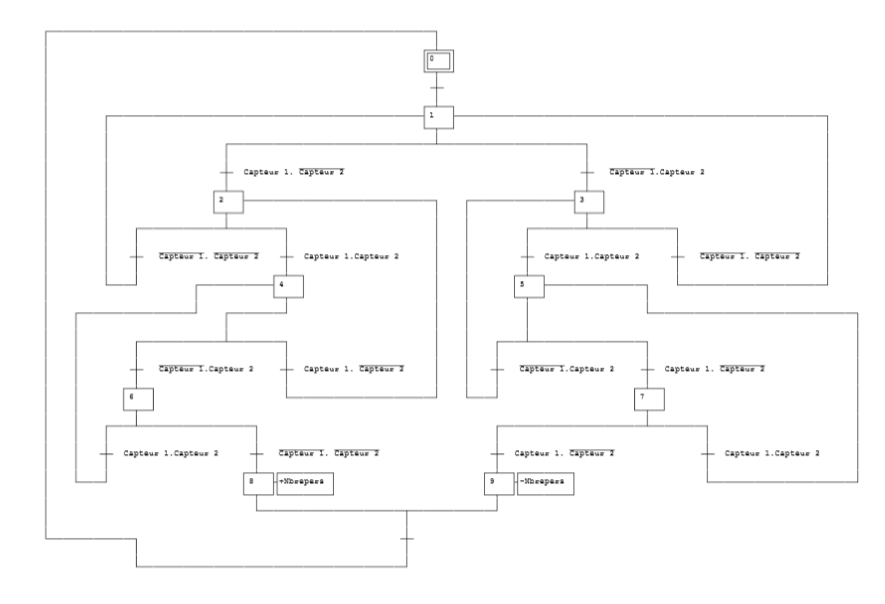
- J'aimerais compter le nombre de personnes présentes dans une pièce.
- Mais je ne dispose seulement que d'une plaquette arduino, de deux capteurs TOR infrarouges et de mon afficheur à cristaux liquides.
- Bien sur, je préfère rester très simple, garder les capteurs au niveau du bassin (pas de jambes, bras, un seul passage...)
Là où je bloque c'est sur comment prévoir tout les cas possibles (aller/retour/j'y vais puis j'y vais pas...) sur mon programme sans avoir ni des "if" ou des "break" à rallonge.
Est-ce que l'un d'entre vous aurait déjà un programme de ce type que je puisse modifier à mon aise (monde d'arduino), ou quelqu'un de mieux calé que moi pour m'aiguiller sur cette question épineuse. D'ailleurs, j'ai cherché partout sur le net et je ne sais même pas si ce système à un nom.
En tout cas, merci beaucoup de me donner un coup de main, c'est vraiment un projet qui me tient à coeur.
-----

 La à froid, je vois pas de dispositif permettant de faire ça simplement. Attendons d'autres avis...
La à froid, je vois pas de dispositif permettant de faire ça simplement. Attendons d'autres avis...