

Bonjour tout le monde,
Je viens chercher quelques conseils sur ce forum qui m'a déjà tant aidé par le passé. Jusque là, je n'ai jamais eu besoin de créer de sujets car j'avais la chance de toujours trouver quelqu'un dans le même cas que moi. Or aujourd'hui (et depuis quelques jours) ce n'est pas le cas, c'est donc moi qui peut-être aidera un prochain.
J'expose le contexte :
Je souhaite récupérer l'énergie généré par un mcc lorsqu'il est en fonctionnement générateur (un espèce de freinage régénératif mais c'est un autre sujet). Avant de faire cela, j'ai décidé de faire une étude théorique afin de voir si cela vaut le coup, et si ce projet est viable. J'ai donc fait quelques recherches, j'ai trouvé différents moyens d'arriver à cela. J'ai choisi d'utiliser LTSpice pour modéliser mon moteur DC (la partie électrique et mécanique) car il dispose d'une large bibliothèque de composants et qu'il est connu pour donner des résultats plutôt réaliste (bien sur il faut que la modélisation et les options de simulation tiennent la route).
La modélisation du moteur :
Je ne vais pas tout réexpliquer parce que l'on trouve ça partout, mais un moteur ça peut se modéliser par une résistance en série avec une inductance, et une source de tension pour représenter la FEM (ou FCEM).
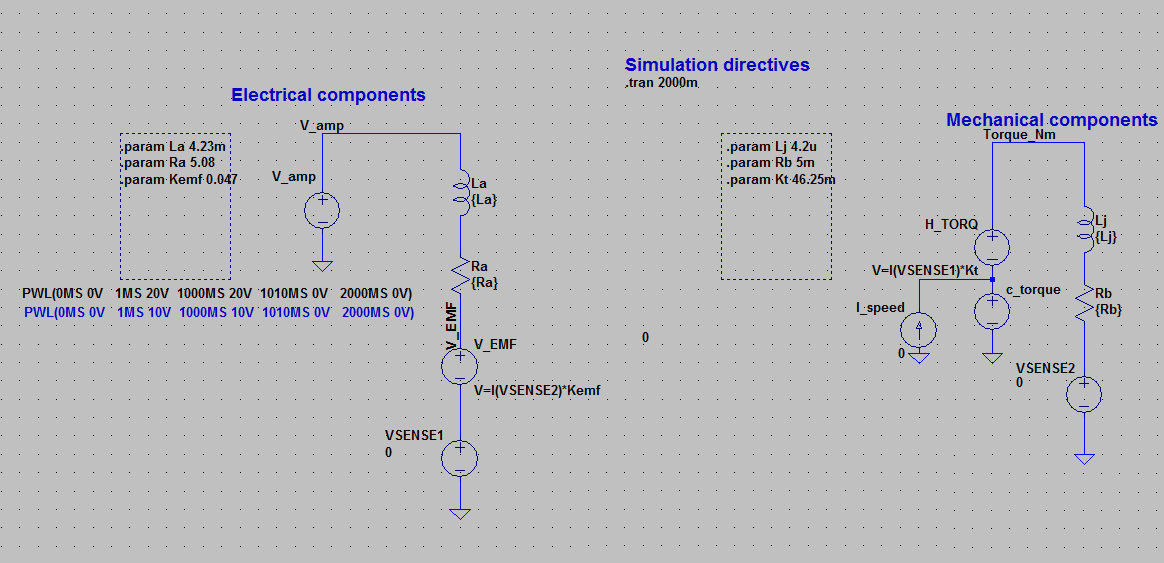
Pour la partie mécanique on peut faire la même chose si on considère que le couple est relié à la vitesse de rotation par l'équation : C = J.dω/dt + B.ω (où C est représenté par une tension, ω est représenté par un courant, et J (inertie) / B (friction) par une inductance et une résistance). Sur LTSpice IV ça donne ça :
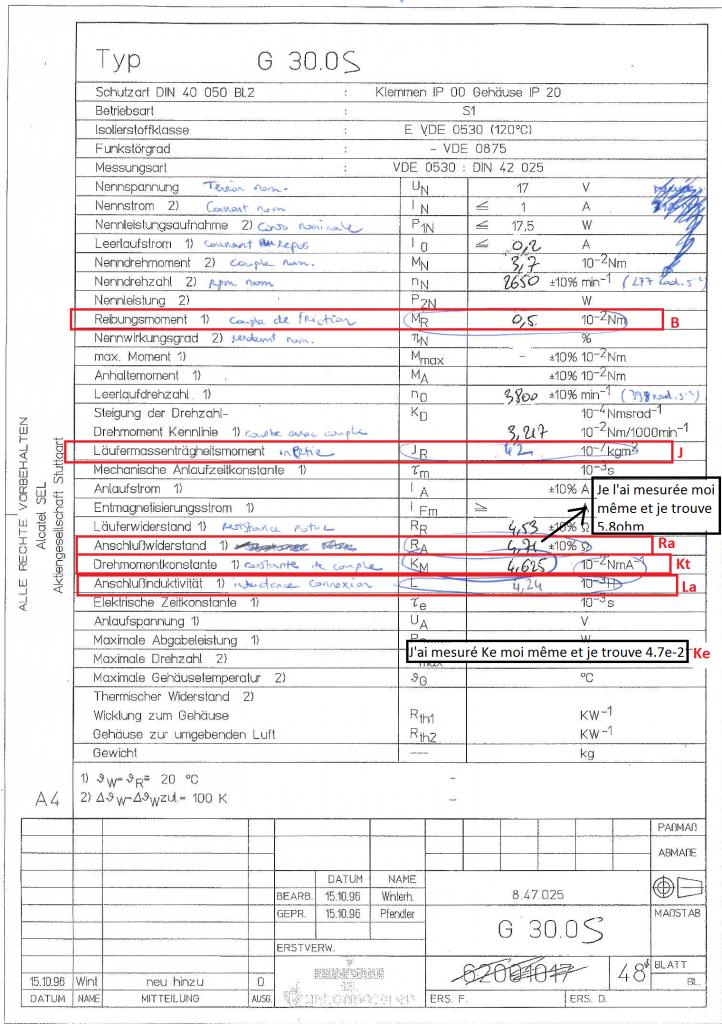
Les grandeurs Ra, La, Lj, Rb et Kt je les ai trouvé dans la doc du moteur.
Ra je l'ai remesurée en alimentant le moteur,bloquant le rotor et en traçant U en fonction de I pour retrouver R.
et Kemf je l'ai mesurée en prenant un moteur identique, qui en entraînant le second génère une FCEM dans ce dernier, et par la relation E=Ke.Ω j'ai pu obtenir Ke.
Le soucis :
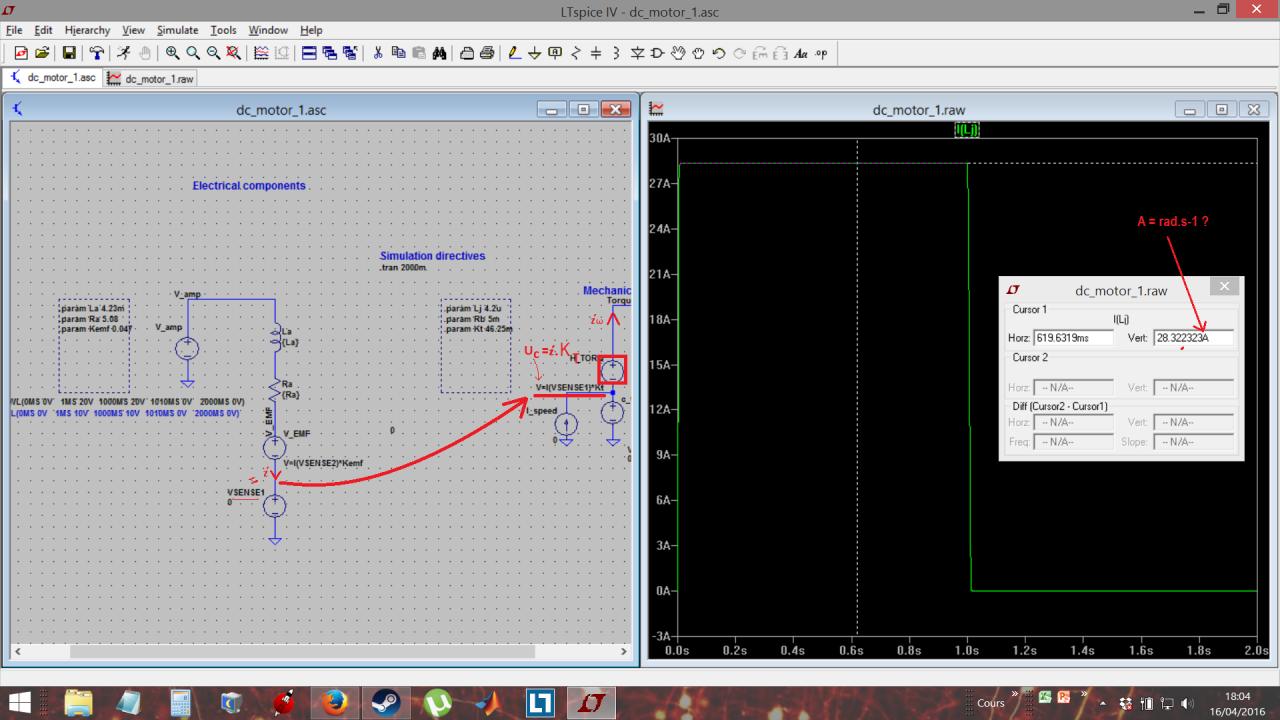
D'après mon modèle, la vitesse de rotation du moteur est représentée par le courant circulant dans le modèle mécanique. Si je ne me trompe pas, je devrais avoir A <=> rad.s-1
Or ce n'est pas du tout le cas ! Quand à 20V en entrée, mon moteur devrais avoir une vitesse de rotation de ~390 rad.s-1, ma simul me donne une vitesse de 18.7rad.s-1.
Par contre, si je change la valeur de Ra et que j'ajoute un E-3, je tombe sur 393rad.s-1, ce qui est vraiment proche de ce que j'attends ! (Ne me jugez pas sur ça, je sais que cette valeur de R est impossible dans un moteur de cette qualité, j'ai fait ça pour savoir où est ce que j'ai pu me tromper)
Et c'est la même chose pour toutes les valeurs de tension que j'ai testé avec mon moteur.
Ou alors, une autre piste que j'ai privilégié, la valeurs du couple de friction donnée par la doc est fausse, car en la multipliant par 10 (0.05Nm au lieu de 0.005Nm) je m'approche des valeurs attendues (mais moins qu'en changeant la valeur de la résistance de l'induit).
Un spécialiste de modélisation de moteurs pour me guider ? Ou alors même un nom spécialiste
Voilà, merci d'avance et désolé pour le pavé.

-----




 )
)
{kind=link}