

Bonjour à tous,
j'ai vraiment besoin d'aide, je ne m'en sors pas. Mon problème repose sur une difficulté d'interruption.
Que je vous présente mon projet: J'ai pour objectif de créer un petit appareil permettant d'infuser le thé à l'aide d'une pompe en fonction de chaque type ( le temps d'infusion changera entre du thé noir et du thé vert). Pour ce faire, j'allume mon proto avec un bouton, puis je souhaite choisir mon type de thé, ceci étant indiqué par la couleur de ma LED multicolore ( Vert pour thé vert, rouge thé" rouge etc..) Je vous ai mit en PJ un morceau de synoptique.
Seulement, je n'arrive pas à gérer mes interruptions. Je n'arrive jamais à passer mon premier mode/type de thé. J'aimerai qu'au fur et à mesure des clics( je passe de programme en programme (1 clic -> programme thé vert et donc LED verte, 2ème clic programme thé rouge ...). Il y a une deuxième LED qui est censé indiquer si la température est trop chaude (vous le verrez dans la synoptique)
Merci beaucoup à ceux qui prendront le temps de m'aider. Bonne journée.
Voici le code (GPIOB1-2-3->LED, GPIOC->POMPE, GIPOD7->Bouton)
Code:void detection2(void){ In1=GPIO_ReadInputPin(GPIOD,GPIO_PIN_7); /*if (In1==0) { //Si l'entrée est à 0 In1_0++; In1_1=0; if(In1_0> Debounce) { In1_0=Debounce+1; StatoIn1=0; } } else {//si l'entrée est à 1 In1_1++; In1_0=0; In1_1++; if(In1_1> Debounce) { In1_1=Debounce+1; StatoIn1=1; } }*/ old_state = In1; while (1) { new_state = In1; /* Détection d'un changement d'état */ if (old_state != new_state) { if (new_state == 1) { /* Traitement du front montant */ } else { choix++; /* Traitement du front descendant */ } old_state = new_state; } } } void main(void) { int d=0; bool i = FALSE; CLK_Config(); GPIO_Config(); TIM1_Config(); TIM4_Config(); enableInterrupts(); while(1){ // wfi(); detection2(); if(choix>2)choix=0; switch (choix){ case 0: for (d=0;d<20000;d++){ GPIO_WriteHigh(GPIOB,GPIO_PIN_1); GPIO_WriteHigh(GPIOC,GPIO_PIN_1); GPIO_WriteLow(GPIOB,GPIO_PIN_2); GPIO_WriteLow(GPIOB,GPIO_PIN_3); break; } case 1: for (d=0;d<20000;d++){ GPIO_WriteHigh(GPIOC,GPIO_PIN_1); GPIO_WriteHigh(GPIOB,GPIO_PIN_2); GPIO_WriteLow(GPIOB,GPIO_PIN_1); GPIO_WriteLow(GPIOB,GPIO_PIN_3); break; } case 2: for (d=0;d<20000;d++){ GPIO_WriteHigh(GPIOC,GPIO_PIN_1); // GPIO_WriteHigh(GPIOB,GPIO_PIN_3); GPIO_WriteLow(GPIOB,GPIO_PIN_2); GPIO_WriteLow(GPIOB,GPIO_PIN_1); break; } } }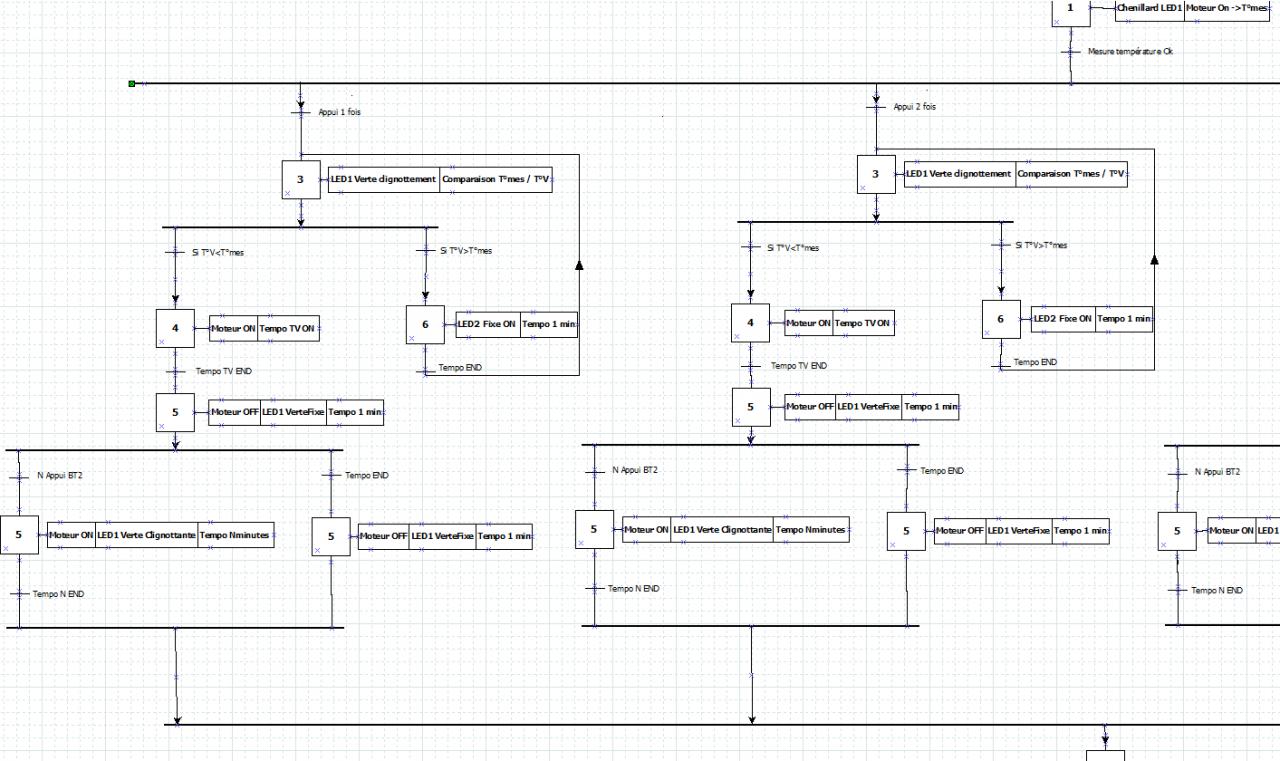
-----


 )
)