


Bonjour,
je vous présente un problème duquel je n'arrive pas à sortir.
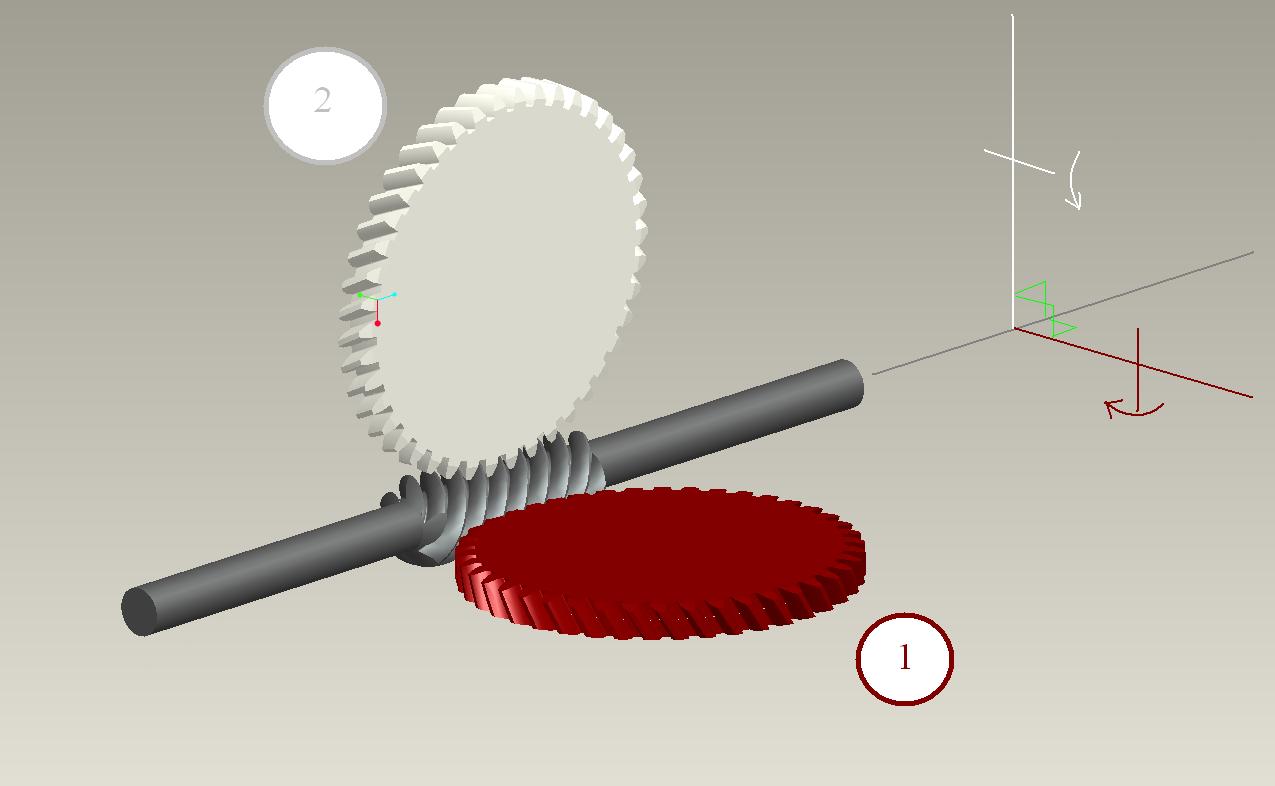
J'ai le mécanisme d'engrenages qu'on peut voir sur cette image:
La roue à pas gauche en rouge (n° 1) est le composant qui mène le système.
Elle est connectée à l'arbre de ce petit micromoteur pas à pas (première colonne, code 16239) et produit la rotation de la vis sans fin en gris.
La vis sans fin, à la fois, produit la rotation de la roue à pas gauche en blanc (n° 2), qui représente la sortie du système.
Tout est miniaturisé: figurez-vous que la roue en rouge fait 11 mm de diamètre et le reste il est proportionné.
J'ai lu les autres discussions de ce forum et j'ai appris que le couple en entrée est conservée et fourni en sortie:
- à peu près identique en valeur, à cause des frottements entre les engrenages et du rendement;
- différent en vitesse, selon les dimensions des composants.
Le micromoteur que je vais utiliser fournit un couple de 1.1 in-oz, c'est à dire environ 0.75 N-cm.
En étant un micromoteur pas à pas, l'intéret c'est de controler la rotation de la roue en sortie. Par exemple, je veux savoir que à X pas de la roue 1 correspondent Y pas de la roue 2.
La présence de la vis sans fin est indispensable, car on a besoin de garantir lirréversibilité du système: juste la roue 1 en rouge doit pouvoir mener le système.
Le mouvement de rotation du micromoteur ne sera pas vite mais très lent, comme on a besoin d'un haut niveau de précision. Et il sera possible dans les deux sens, horaire et antihoraire.
Mon problème c'est donc de dimensionner les 3 composants pour obtenir une bonne transmission de la rotation.
Sur l'image les deux roues ont la meme dimension; dans le vrai mécanisme, la roue de sortie n° 2 sera beaucoup plus grande. Je propose donc d'indiquer les rayons symboliquement, par exemple R1, R2 et Rv pour la vis.
Est-ce que c'est possible de trouver une formule qui puisse me donner la vitesse (et le couple) en sortie en fonction de la géométrie du système et de la vitesse et du couple en entrée?
Merci d'avance de vos réponses, bon après-midi
-----
 ), une système roue et vis sans fin est, souvent, irreversible. C'est à dire que la vis peut toujours entrainer la roue, mais l'inverse n'est vrai qu'en considération des angles de denture (et des matériaux). En gros, il faut que les filets de la vis soient "peu inclinés" par rapport à l'axe pour que la roue puisse l'entrainer (c'est une image, la réalité se calcule). Et de toutes façons, ça induit un rendement horrible...
), une système roue et vis sans fin est, souvent, irreversible. C'est à dire que la vis peut toujours entrainer la roue, mais l'inverse n'est vrai qu'en considération des angles de denture (et des matériaux). En gros, il faut que les filets de la vis soient "peu inclinés" par rapport à l'axe pour que la roue puisse l'entrainer (c'est une image, la réalité se calcule). Et de toutes façons, ça induit un rendement horrible... ), vous voulez bien gérer un problème d'irreversibilité donc. Et bien votre système n'est pas dans le bon sens (ou alors j'ai rien compris
), vous voulez bien gérer un problème d'irreversibilité donc. Et bien votre système n'est pas dans le bon sens (ou alors j'ai rien compris  )
)







