Bonjour,
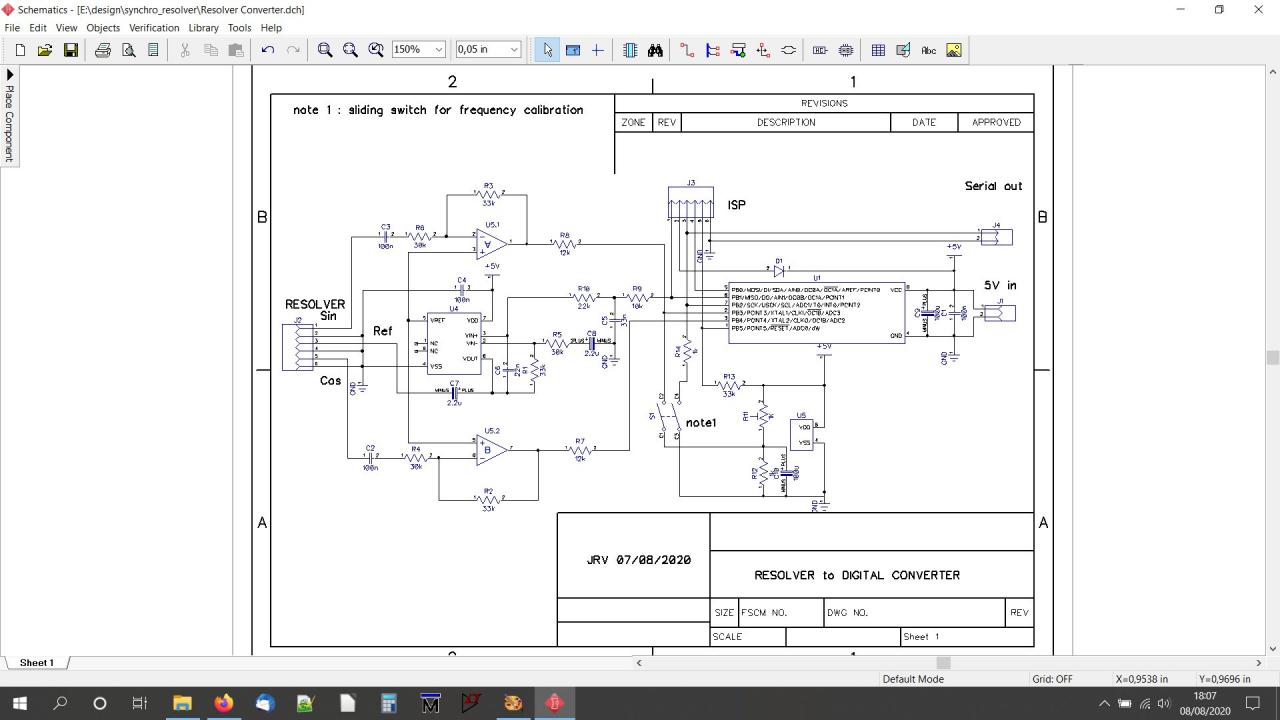
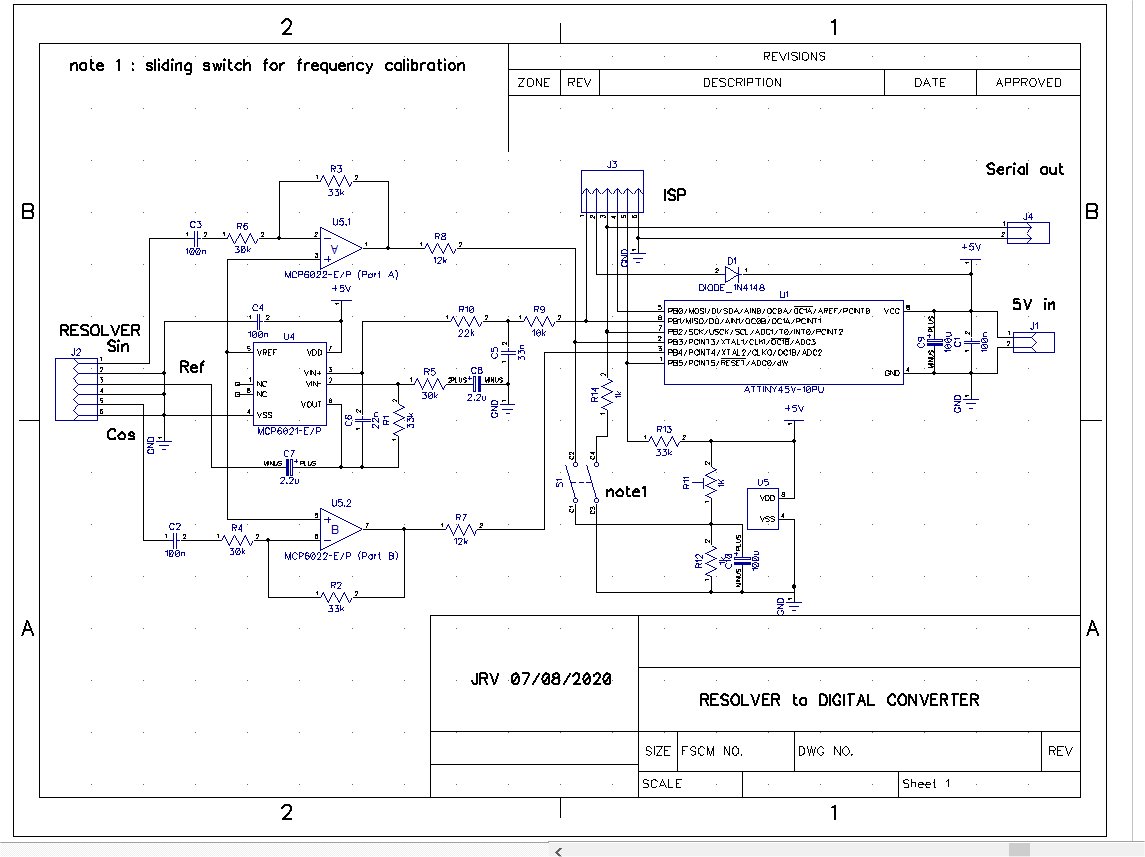
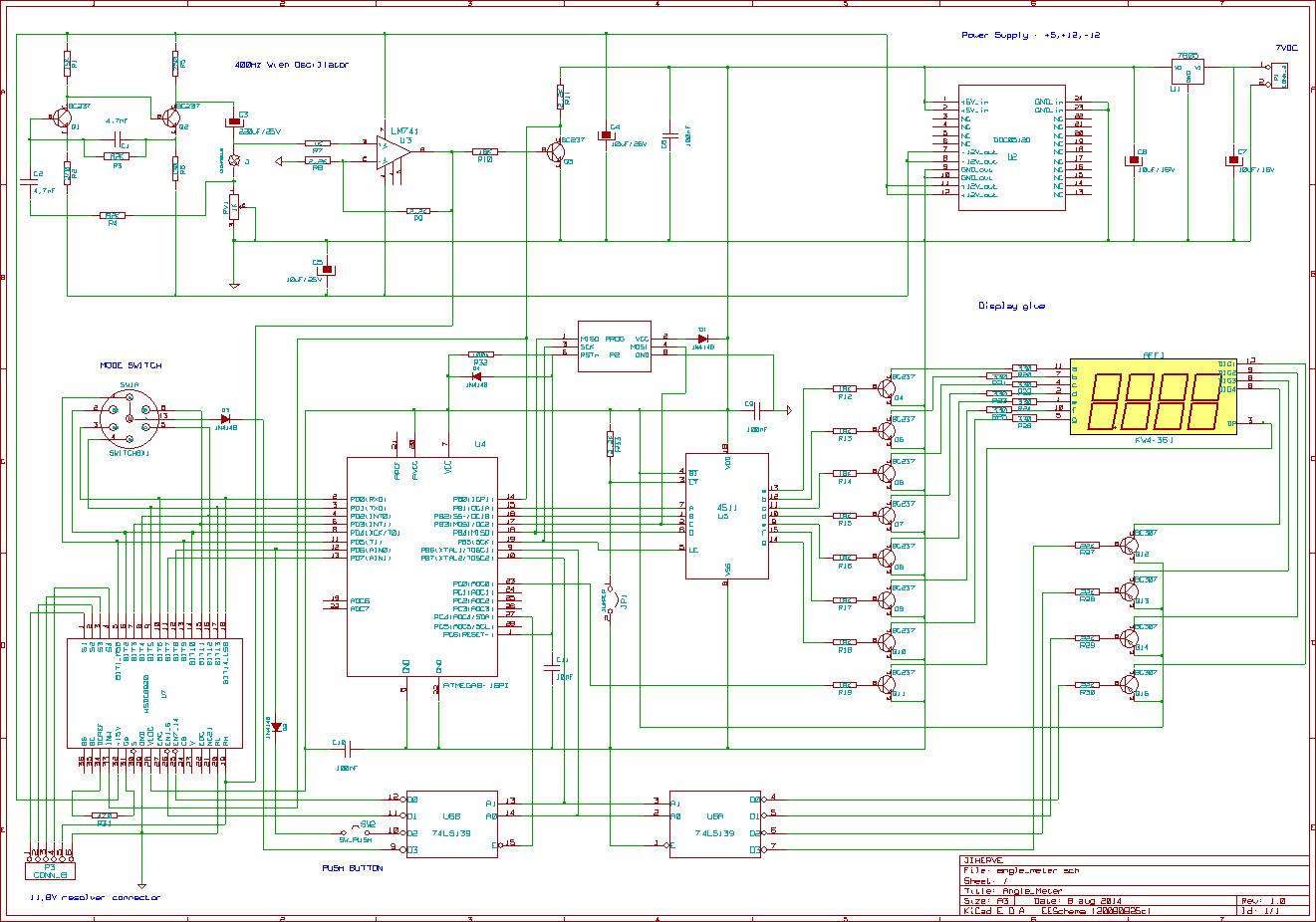
une petite bidouille utilisant un Atmega8A et un convertisseur synchro numérique pour acquérir et visualiser un angle capté par un resolver.
C'est pour faire un diviseur sur un tour.
le pont de Wien n'est pas de moi , je l'ai juste corrigé car le schéma original n'est pas fonctionnel.
Beaucoup de fond de tiroirs.
si cela interresse j'ai aussi le soft.
JR
-----