


bonjour tout le monde)
j suis un élève ingénieur en classe terminale spécialité génie électrique et maintenant j'ai à réaliser mon projet de fin d'études intitulé Système de détection des pannes d'une table de contrôle technique.Ce projet consiste à faire la conception d'une carte électronique qui contient un PIC 18F4550 lié avec un PCF8583(real time clock);les entrées sont trois boutons poussoirs (machine en panne,début d'intervention et fin d'intervention).En outre lorsque la machine tombe en panne, l'ouvrier doit appuyer sur "machine en panne" afin de faire appel au technicien avec un signal d'alarme et le technicien intervient pour la réparation.mon cahier de charge impose l'utilisation du port USB comme port de communication entre le PC et ma carte afin d'envoyer(lorsque le technicien appuie sur les boutons début et fin d'intervention le temps et la date exactement à mon interface graphique.
j'ai trouvé bcp de problèmes au niveau de ce projet dont j vais les citer ci-dessous et que j'espère bien avoir de l'aide:
1- La programmation du PIC et du PCF8583:j n'arrive pas à les programmer alors que j'ai lu pas mal de forums et des articles et en plus j ne suis habitué à la programmation pic(sur le PIC C COMPILER) donc j ne sait pas exactement quoi faire(j programme la partie USB et la partie PCF séparément et après comment les charger dans mon PIC et notons bien que j'ai trouvé des codes HID ou CDC comme des exemples ainsi que pour le PCF mais j'ai pas pu savoir comment les modifier.)
2- j'ai perdu beaucoup de temps à lire des tutoriels sur la programmation JAVA afin de réaliser l'interface mais après un mois j'ai découvert que le JAVA USB API n'est pas fiable sur l'OS windows donc maintenant j dois voir un autre langage de programmation pour voir si c'est possible la liaison avec l'USB.y t'il klk qui a travaillé sur le langage JAVA avec l'USB et qui pense que mon projet est réalisable avec le JAVA????
3- comment faire la connexion de ma carte avec le PC afin d'avoir le temps et la date dés que le technicien appuie sur les boutons ??
SVP c'est la galaire pour moi et j sais bien que je demande trop de choses mais je n'ai publié dans ce forum que lorsque j me suis bloqué pour de bon et c'est trop tard pour mon avancement dans le projet donc SVP SVP essayez de me répondre le plus tôt possible
MERCI d'avance)
-----



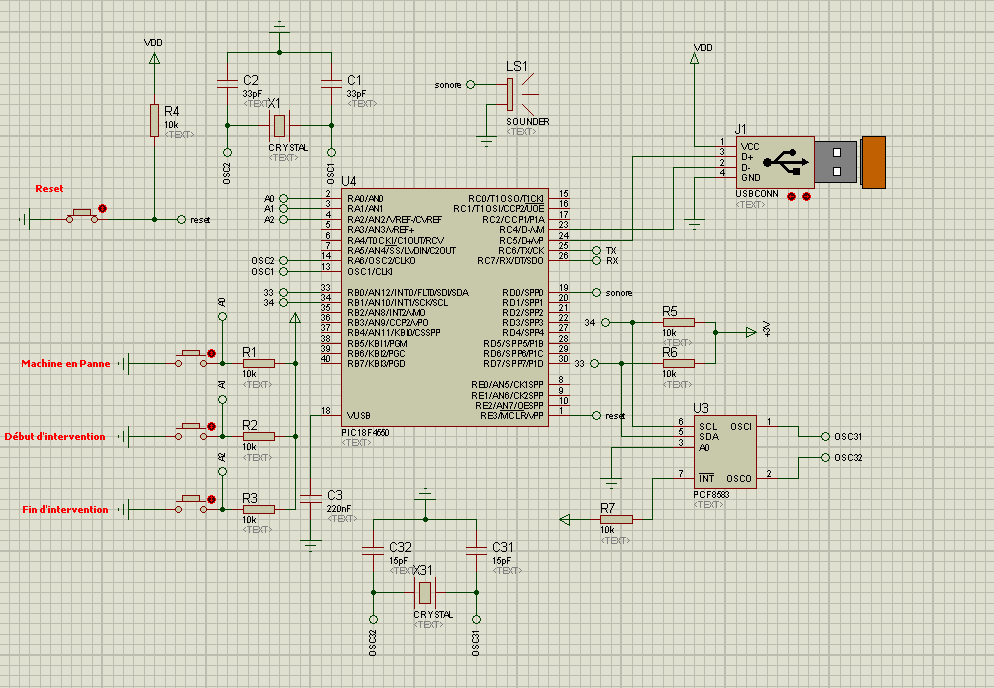 :Voici mon schéma ISIS
:Voici mon schéma ISIS