


Bonjour, je suis en seconde et avec un ami nous travaillons sur un projet avec du raspberry pi et on a besoin de votre aide :
On veut contrôler avec des ports gpio, 5 moteur pas à pas (avec un alim externe sachant que le rpi fournit que du 3.3v)
Si on a bien compris :
On a donc des moteurs pas a pas à quatre fils, deux fils par aimant. telle que deux fils A et A' pour l'aimant A et un fils B et B' pour l'aimant B, selon dans quelle fil le courant rentre cela inverse la polarité et fait tourner le moteur...
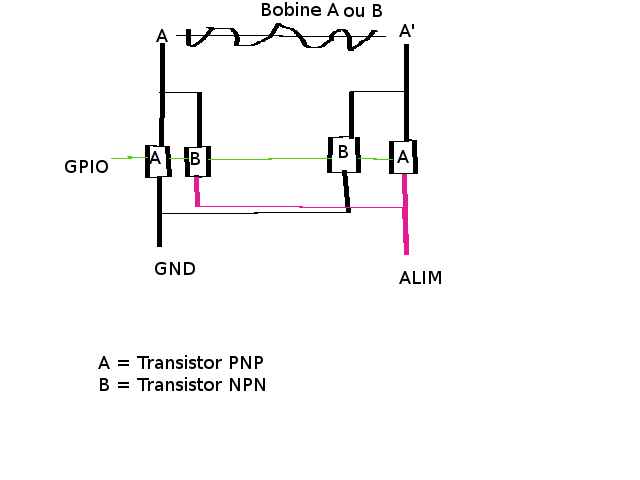
Pour cela on a fait un montage du genre pour un aimant (4 transistor par aimant, deux PNP et deux NPN, ce qui fait 8 transistor par Moteur, de manière a n'utiliser que deux port GPIO par Moteur, un pour chaque bobine):
Si on ne se trompe pas encore... un PNP fait passer le courant (Ici l'alim) quand il reçoit une impulsion (Le 3.3v du GPIO) et un NPN ne le fait plus passer quand il reçoit une impulsion... ou l'inverse...
Bref je viens içi pour que vous nous disiez si c'est juste ou pas et si c'est faux, nous éclairer car notre prof de seconde n'est pas apte a nous aider...
Je vous remercie d'avance ;p


-----


