


Hello
Je commence avec l’arduino et la prog et j’avoue être un peu perdu par moment avec les moteur pas à pas.
Voilà si vous pouvez m aider
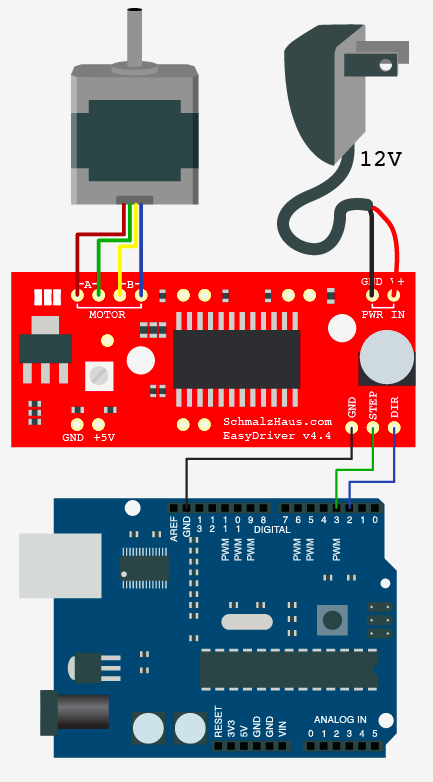
J’ai un arduino uno avec un easydriver alimenté en 19v et un moteur pas à pas unipolaire (200 tr/min) (4fils) connecté dessus
Donc 3 fils branchés sur mon arduino( le gnd, le rouge et le noir)
J aimerai savoir comment donner une angle maximum au moteur , exemple une ouverture de 180degrés max qu il ne fasse pas un tour complet
exemple j ai un soft qui lui envoi des données négative ou positive tant que c est positif le moteur va tourner dans un sens et dans l autre avec des valeurs negative mais j aimerai dire au moteur tu as un angle vers la gauche max de 90 en partant de zero et idem pour la droite
Imagniez un volant de voiture qui serai brancher sur mon moteur et je lui dis tourne à droite mais au bout de 45 pas tu es bloquer et tu restes dans cette posision tant que tu recois des valeurs positives , idem pour l autre côté..
idem je ne comprends pas trop la variable “stepper.monmoteur1=map(valor_ servo,?,?,?,?)
SI quelqu un peu m aider
Merci
-----


