Salut,
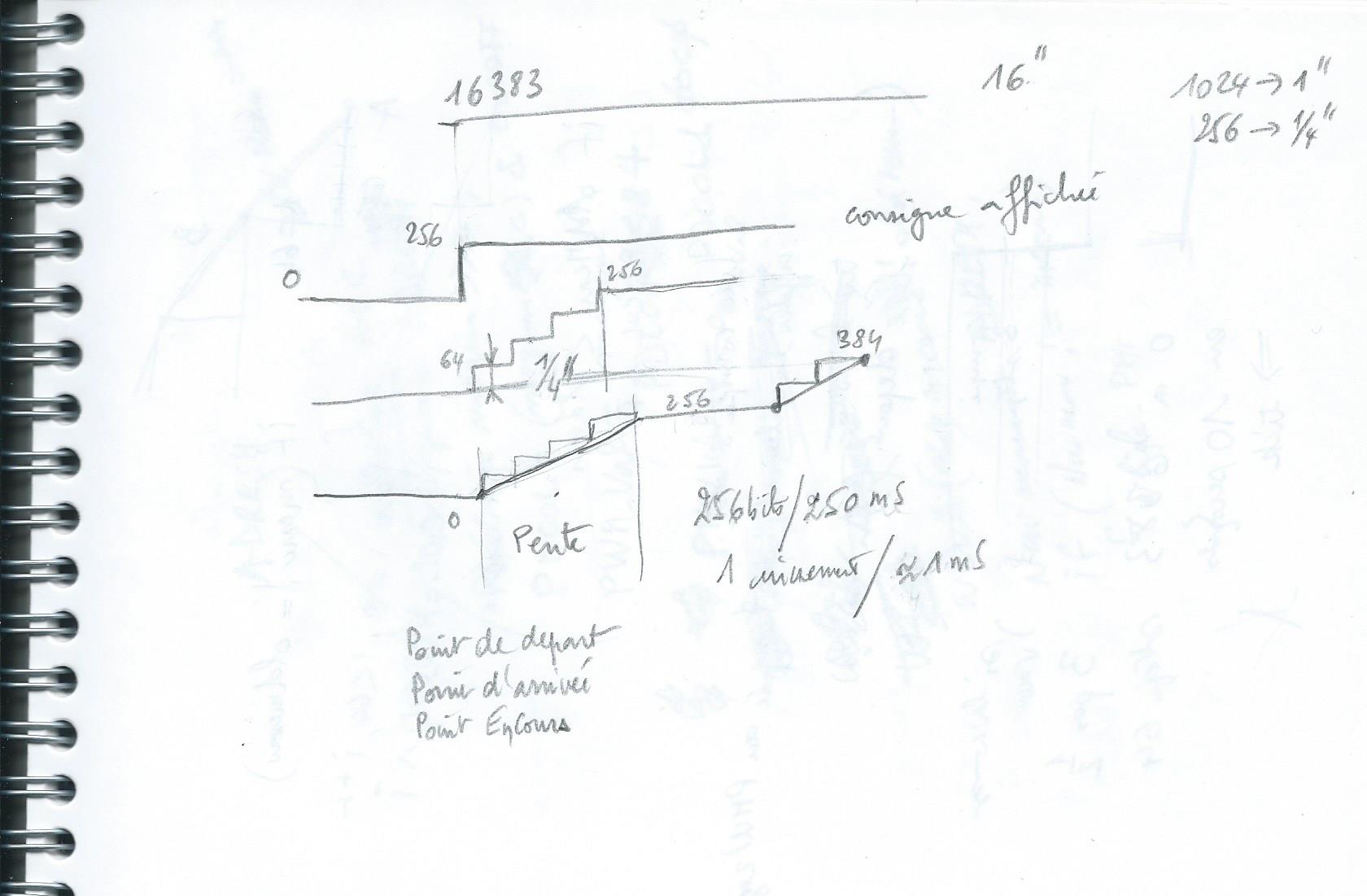
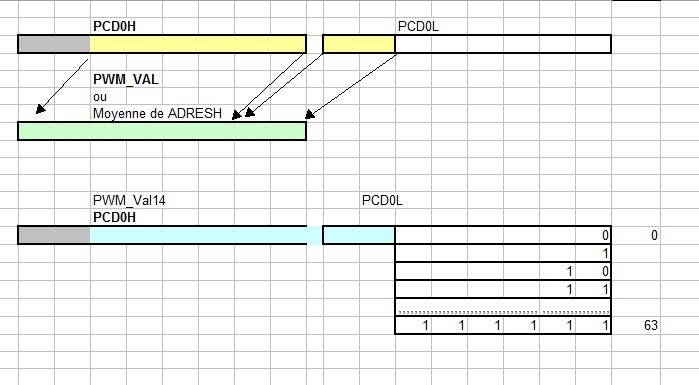
Ce que je veux faire, c'est comparer si mon PWM (8its de poids fort) est égale à la consigne (8 bits du CAN) ;
- Si PWM <, on augmente les 6 bits de poids faible jusqu'à ce que PWM atteigne la consigne. (à chaque interruption Timer).
- Si PWM >, on diminue les 6 bits de poids faible jusqu'à ce que PWM atteigne la consigne. (à chaque interruption Timer).
Ceci me permettra d'avoir une courbe linéaire en sortie. Mais pour l'instant, mon code me donne n'importe quoi en sortie (PWM à 50% puis à 0%).
-----