


Bonjour à tous,
J'ai commencé à fabriquer une main artificielle, je suis en train de bosser sur la mécanique de la pince pouce-index, un peu plus délicate, mais presque terminée. Le but de cette main est de saisir délicatement n'importe quel objet, la mécanique s'adaptant à la forme. Voici l'ébauche :
20141214_232553.jpg
De ce fait cette main ne sera actionnée que par un seul moteur pas à pas. Ce moteur serait actionnée par un dispositif Myoelectrique.
Pour ma part, ayant déjà trifouillé dans mon imprimante 3D, je ne connais qu'un seul type de moteur, le nema 17. Il pourrait faire l'affaire, mais je le trouve un peu trop lourd et encombrant.
Auriez vous une idée du type de moteur que je pourrais utiliser? Sachant que j'aurais besoin d'une force de traction de l'ordre de 3 à 5 kg, avec une alimentation comprise entre 4,5 et 12v.
J'aurais également besoin d'un kit Myoelectrique, de préférence arduino compatible, et relativement bon marché.
Vous auriez quelques bon plans, bon sites marchands, ou encore des didacticiels où des liens documentés vers des expériences analogues?
Merci à vous.
-----

 ) ont déjà ajusté des engrenages pour moi, et que mon servo idéal existe. Par exemple je viens de trouver ça:
) ont déjà ajusté des engrenages pour moi, et que mon servo idéal existe. Par exemple je viens de trouver ça: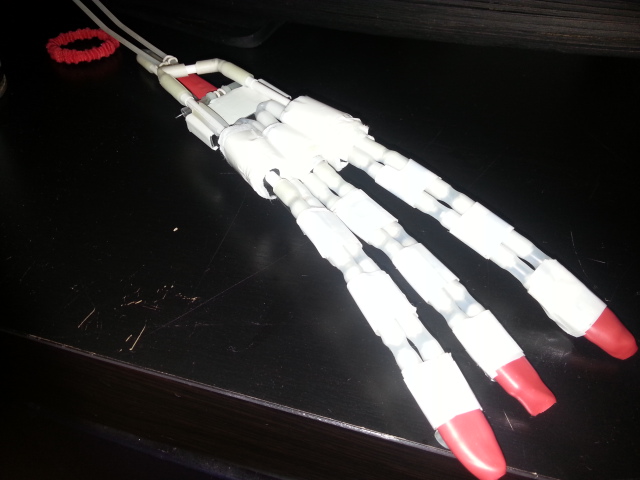{kind=link}