
Bonjour
pourquoi la commande linéarisante (Feedback linearization) ne rejette pas les perturbations !!
merci

-----


Bonjour
pourquoi la commande linéarisante (Feedback linearization) ne rejette pas les perturbations !!
merci
Bonjour,
Un lien vers le document ?
Pour moi tous les asservissements (en boucle fermée) linéarisent et rejettent les perturbations.
Evidemment, le système parfait n'existe pas.
Bonjour Mr gcortex,
Merci pour votre attention,
oui, je veux un lien vers le document, par ce que j'ai un exemple une commande par Feedback linearization appliquée sur un pendule inversé, qui ne rejette pas les perturbation.
voir le résultat :
Bonjour dolf4205 et tout le groupe
Je crois bien que tu n'as pas bien saisi le sens de la demande de gcortex.Envoyé par dolf4205

Ce nest pas lui qui va/doit de donner un lien, mais à toi de le donner, et surtout d'expliquer d'où tu sors la citation de ton #1.
Dans l'état actuel de ta demande, celle-ci est incompréhensible. Si tu veux des précisions, tu dois situer très complètement le contexte de ta demande.
Bonjour Mr gienas, gcortex et a tout le groupe
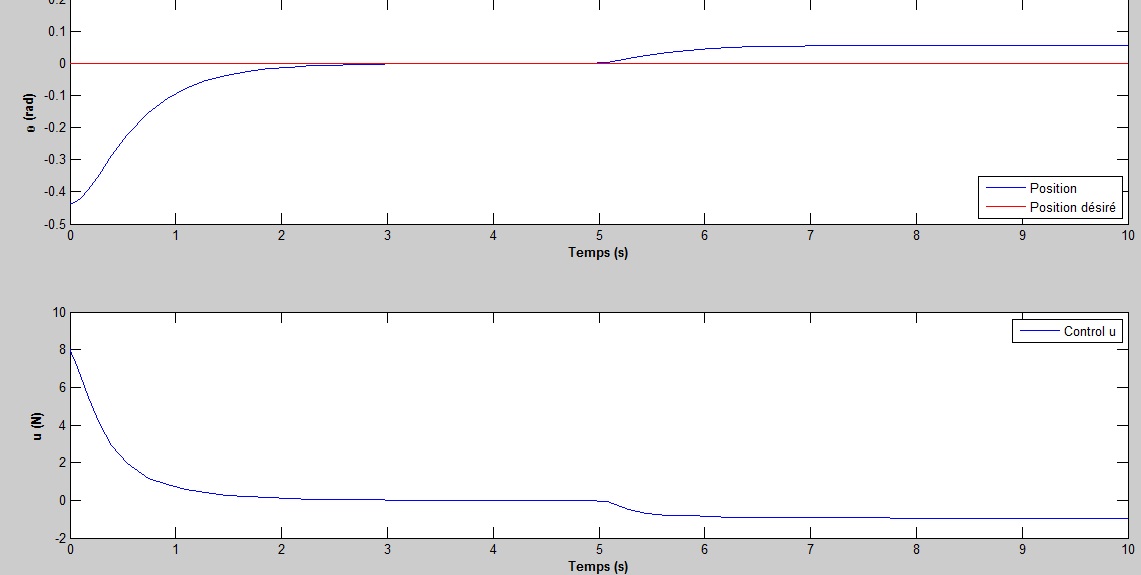
j'ai appliquer la commande linearisante sur un modèle mathématique d'un pendule inversé monté sur un chariot, nous allons injecter un signal constant dist=0.5 comme des perturbations externes.
Le résultat de simulation est montré dans la figure ci-jointe.
On voit que, leffet de ces perturbations se manifeste sur les courbes. Donc le régulateur ne rejeter pas ces perturbations
Le problème c'est que comment éliminer ou compenser ces perturbations .....
Merci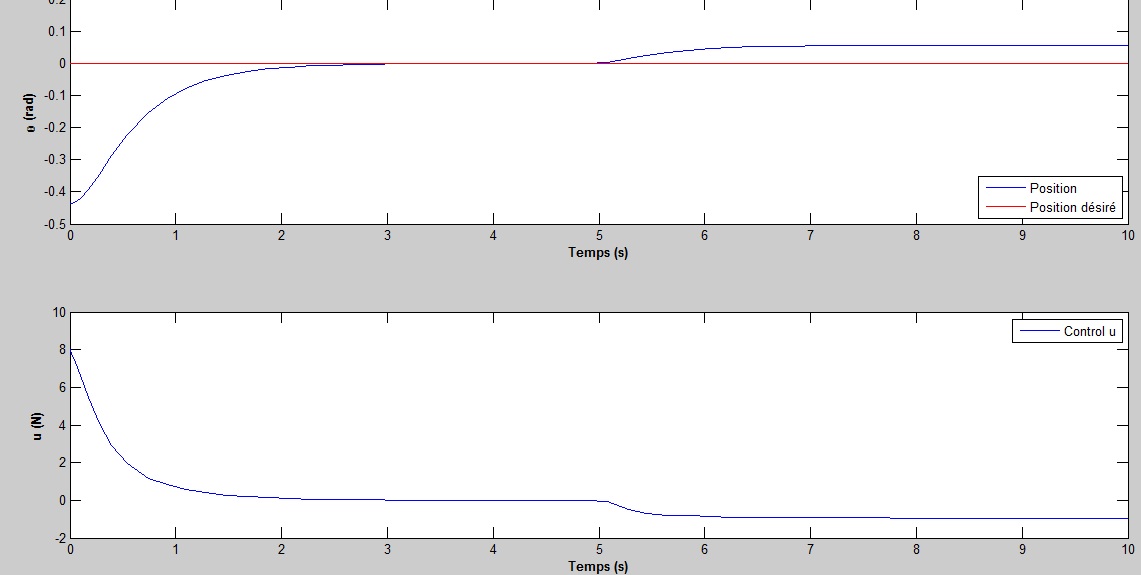
Comme on ne sait pas comment est fait ton asservissement ( PID ?)
Comme on ne sait pas comment est injecté ton signal perturbant
Comme on ne sait pas comment est fait ta mécanique
A priori, ton asservissement n'a pas de commande intégrale mais uniquement proportionnelle
Salut Mr DAUET78,
j'ai appliquer la commande linearisante !!!! ce ne pas la commande PID !!!!?
Sorry, je ne connais pas ce terme ....
Bonjour a tout le groupe,
j'ai appliquer la commande linearisante sur un modèle mathématique d'un pendule inversé monté sur un chariot, j'ai injecter un signal constant dist=0.5 comme des perturbations externes à l'instant t=5 s .
Le résultat de simulation est montré dans la figure ci-jointe.
On voit que, leffet de ces perturbations se manifeste sur les courbes. Donc le régulateur ne rejeter pas ces perturbations
Le problème c'est que comment éliminer ou compenser ces perturbations .....
Resultat.jpg
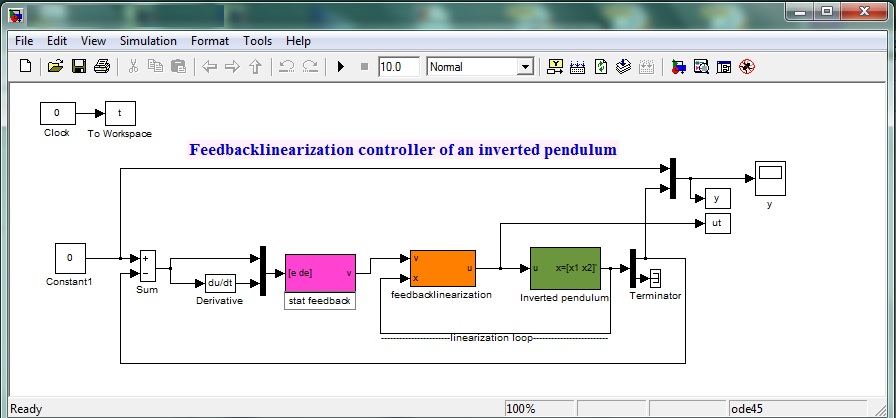
feedback linearisation schema.jpg
C'est quoi un inverted pendulum ?
Le schéma est tiré d'où? D'un site WEB ? donne le lien
Dessolé Mr DAUDET78, Le schéma a été crée par moi simuler par le logiciel Matlab.
Une réponse ?
çà ne sert à rien mais c'est un sujet typique sur les asservissements :
C'est comme un balancier d'horloge, mais l'axe est en bas.
Le but est de le maintenir vertical sans fixation et par translation du socle.
Dernière modification par gcortex ; 11/02/2015 à 08h22.
Comme le clown qui tient sa canne en équilibre sur son nez ? Ok merci .
(inverted pendulum) in Eng = (pendule inversé monté sur un chariot) en Fr
invpen.gif
l'objectif.jpg
salut Monsieur,
c'est un pendule inversé monté sur un chariot
invpen.gif
l'objectif.jpg


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}