


Bonjour tout le monde,
Etudiant ingénieur, je souhaite asservir en position un moteur pas à pas bipolaire à l'aide d'une carte Arduino Uno.
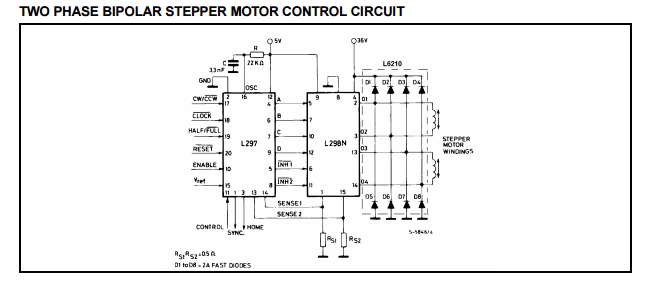
J'ai vu qu'il existe déjà quelques schéma pour l'asservir de ce type :
Cependant j'ai plutôt l'impression que ce principe permet d'asservir le moteur en vitesse...
Pour mon projet j'ai besoin de l'asservir en position : Pouvoir le faire bouger d'un nombre précis de pas (à une vitesse très lente).
Me conseillez vous d'ajouter un codeur pour connaitre la position du moteur ? Est-il possible d'utiliser un module de l'Arduino Uno pour réaliser cette fonction?
Merci d'avance pour l'attention que vous porterez à mon post !
Bonne journée à tous!
Valentin

-----

