


bonjour ,
je suis tout nouveau sur le forum..... et pour cause : je n'ai pas de notion mathématiques poussées (voir niveau "à déterminer????"), j'ai ciré les banc d'école y a 25 ans..
avant de faire appel à vous je me suis documenté, j'ai potassé les notions mathématiques (Pythagore, interjection de 2 cercle), mais rien n'y fait , car c'est dans l'espace ,....on ne peut combler un manque d'enseignement.
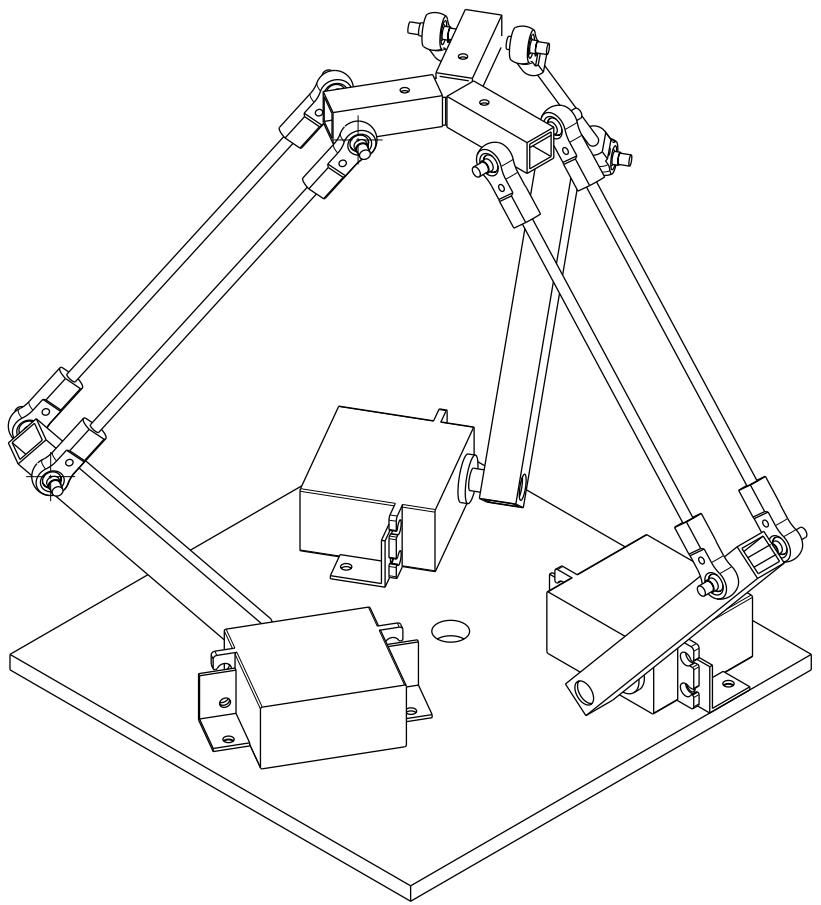
je m'explique : je voudrais développer un système de robot delta simple
le but de ce projet est de polymériser de la résine sensible aux UVs à l'aide d'un laser UV 405nm .doù un chariot piloté par 3 moteurs évoluant en X,Y,Z afin de dessiner un objet coupé en tranches de 0.1mm d'épaisseur.
mon problème est le calcul d'angle à appliquer aux 3 moteurs en fonction de la position x,y du chariot sachant que la position z est donnée....
les moteurs sont positionnés à 120°
il me faudrait une ou plutôt trois formules mathématique qui me permettent de déterminer l'angle de chaque moteurs en fonction d'une position chariot x,y,z
pour faire plus facile, je pense partir d'une position zéro de chaque moteurs mettant la nacelle au centre de la pyramide à une position z donnée et incrémenter la position X ou Y de 1 en 1 piloté par ordinateur, Z étant une donnée de positionnement elle aussi renseignée via le PC
je devrais m'en sortir concernant la programmation du pilotage moteur car je connais se monde là
mais l'inconnuc'est la trigo, les maths quoi....
j'espère vraiment avoir de l'aide de votre part.
et vous en remercie par avance.
salut
PS: si vous voulez voir mon projet : http://forum.allinbox.com/aspectgeek..._1.htm#t129113




-----