

Bonjour à tous !
avant tout, bien que l'introduction, comprenne de la mécanique et de l'informatique, je suis obligé d'en parler avant d'entrer dans le sujet
Actuellement en école d'ingé je travail sur projet qui consiste, en se basant sur un mécanisme imposé, d'aller le plus loin possible dans sa réalisation.
Le mécanisme qui m'a été imposé est le mécanisme de Withworth, aussi appelé "mécanisme à retour rapide".
https://youtu.be/ESBYdJx8X7k Une vidéo qui illustre rapidement le principe.
En fonctionnement "normal", on a en entrée une vitesse de rotation constante (Omega) qui impose une vitesse de sortie (Vs) non constante.
Dans notre projet nous devons chercher une "utilité" à ce mécanisme (s'en servir pour faire quelques chose) intégrant de la robotique (je suis en filière mécatronique).
Suivant cette optique, nous nous sommes proposés pour en fairte un banc d'essai de moteur en inversant le système :
on veut en entrée la vitesse linéaire constante (ou plutot à sinusoïde constante) où une masse sera accrochée à l'extrémité de la barre, et nous voulons voir la réponse du moteur.
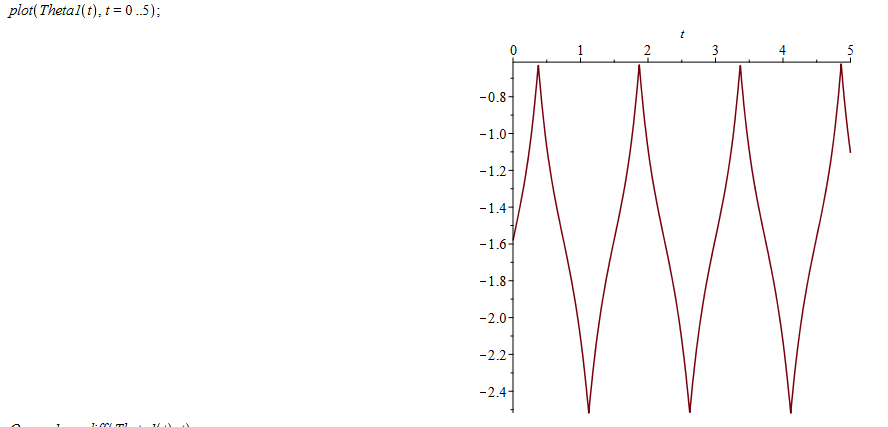
Pour cela nous avons calculé le modèle géométrique inverse du système à l'aide de maple, voilà le résultat obtenu, traçant l'évolution de Theta(t) en fonction d'un déplacement en sortie Xe(t) sinusoïdal :
Vous le voyez, le problème est que mon angle theta(t) reviens sur lui même. Le problème vient du fait que lorsque la barre extremum, une fois arrivée à son extrémité, maple comprend que pour revenir en arrière, il faut faire tourner theta dans l'autre sens. Forcément comme c'est la vitesse de rotation et son accélération qui m'intéresse, après cela donne des choses assez moches.
Plusieurs solutions s'offrent à moi.
- L'une d'elle dont m'a parlé mon prof est l'utilisation de fonction "complexes", il avait vu ça durant ses études mais ne l'a jamais revu depuis et n'a pu m'en dire plus dessus. Ces fonctions autre que le cosinus et le sinus, permettraient de se séparer du modulo d'un angle (le fait que 2*Pi soit assilimé à 0° pour le cosinus et le sinus par exemple) je pense que c'est cela qui me bloque.
- Une autre serait de "découper" chacun des morceaux et de reconstituer artificiellement la fonction Theta(t) pour ensuite pouvoir la dériver.
J'espere avoir été clair, merci de votre aide.
Cordialement.
Vincent.
-----