

bonjour a vous tous
et merci de m'aider
bon voila le topo
je fabrique un robot
et
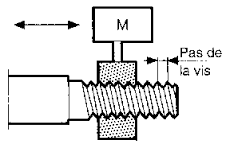
je recherche la formule ou les formule qui me permettrais de faire un déplacement sur l' axe des x a partir d'un arc de cercle en et des explication
en gros j'ai un moteur qui tourne rond qui me sert a faire tourner sur l'axe des x et y mais j'aimerais qui se déplace droit donc seulement sur axe des x
et j'ai un autre moteur qui se charge du déplacement en y qui lui est totalement droit
je vais joindre une image dessiner pour être plus précis de mon problème
prob.jpg
très cordialement bob le scientifique


-----






 c'est celle de mon imprimante 3d repcap avec arduino plus préciser ment marlin qui est disponible sur le net gratuitement sur internet si tu veut je peut te donner le lien
c'est celle de mon imprimante 3d repcap avec arduino plus préciser ment marlin qui est disponible sur le net gratuitement sur internet si tu veut je peut te donner le lien  reverso
reverso{kind=link}
{kind=link}
{kind=link}
{kind=link}