

Bonjour,
En bref, je dois faire une robot incendie pour le Bac. Ce robot possède un capteur ultrasons HC-SR04. (plus de détails sur le robot http://forums.futura-sciences.com/te...-capteurs.html)
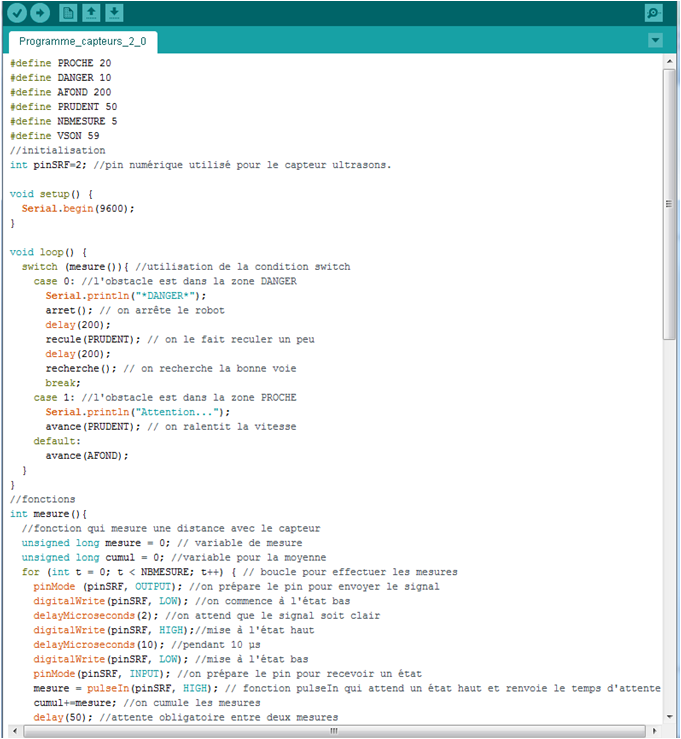
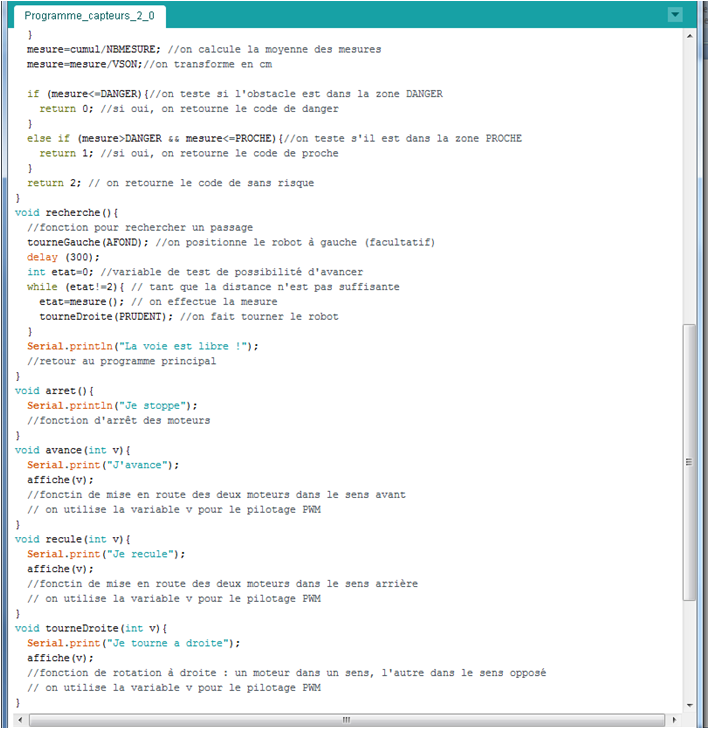
Image1.pngImage2.pngImage3.png
Je me questionne sur la validité de mon programme. Est-il bon ? Des erreurs de définition de variables, contradictions ... ? Je ne connais pas trop la programmation, alors merci d'avance de votre aide
-----




{kind=link}
{kind=link}
{kind=link}