Bonjour à tous,
Comment développer la physique d'une voiture à partir de zéro (sans collisions) sachant que c'est pour un city builder sur Unreal Engine 5, donc je suis censé pouvoir générer quelque chose comme 1000 véhicules.
Ainsi la voiture devra adopter un comportement réaliste (coûteux) lorsque la caméra est proche et un comportement très simplifié mais pas trop irréaliste lorsque la caméra est éloignée.
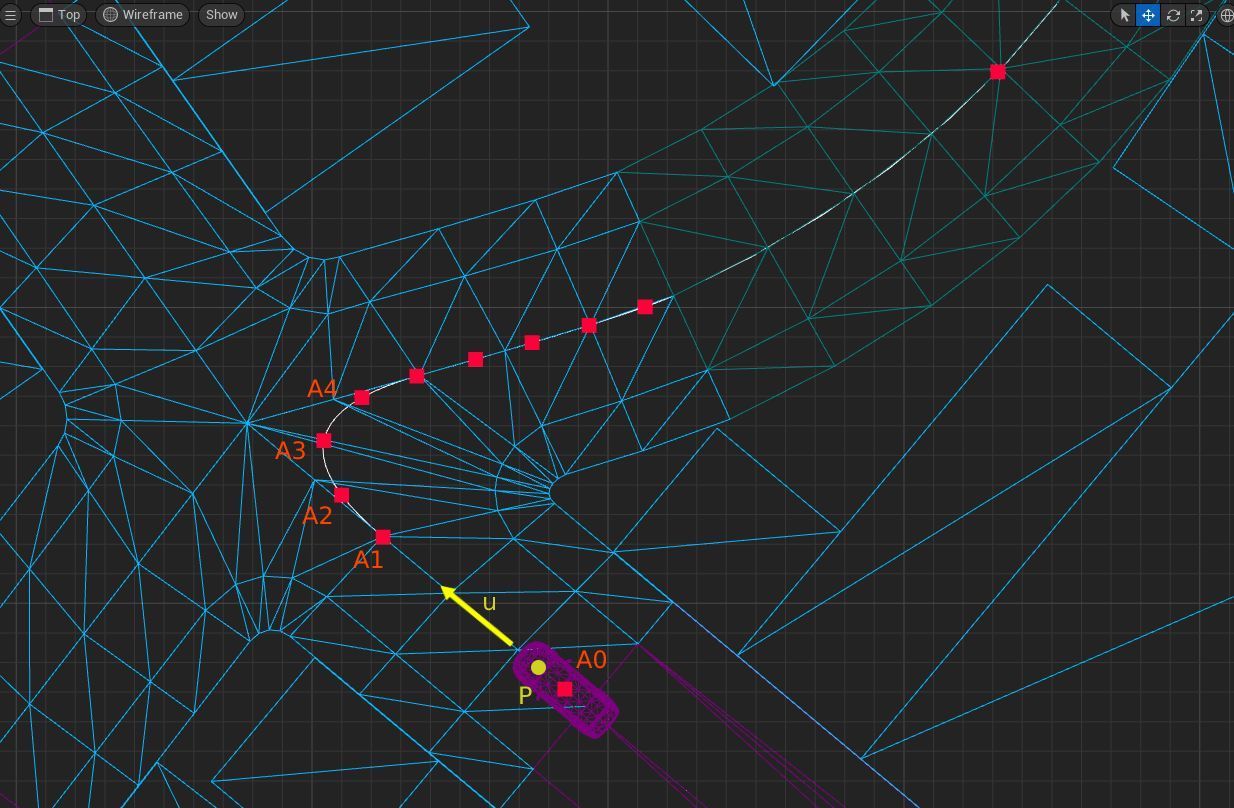
Par "sans collision" j'entends pas de collision avec d'autre véhicules ni avec l'environnement physique. Les voitures suivent une série de points et de tangentes le long le long de splines. Pas non plus de collision avec le sol car c'est un static mesh plat.
Simplifions la voiture à 2 éléments : le corps (C) et les 2 roues motrices (R).
Par physique j'entends, un mouvement réaliste de C par rapport à R par contrainte physique (quand je tourne le volant j'aimerais que ça ressemble visuellement à une voiture qui prend un virage) . Mais aussi C n'aura pas le même comportement suivant la force centrifuge, la force de freinage, la hauteur du centre de gravité, le réglage des suspensions etc...
L'idée c'est de désactiver le comportement autonome de C lorsque la caméra est suffisamment éloignée, par soucis de performance car dans un city builder énormément de véhicules son visibles en même temps.
Je n'utilise pas l'Objet Vehicule dans Unreal Engine 5 car je sais que c'est une usine à gaz et que si je spawn 1000 véhicules mon FPS va chuter à 1 (même en désactivant un max de paramètres quand la caméra est éloignée (sorte de "LOD algorithmique").
J'ai opté pour la flexibilité et la performance "idéale" en essayant de développer from scratch.
J'ai trouvé cet article de thèse qui est très complet mais ça va me prendre beaucoup de temps de l'implémenter en c++
https://nccastaff.bournemouth.ac.uk/...hat/Thesis.pdf
J'ai cherché sur Github un tru prémaché mais en vain.
Vous me conseillez d'orienter où mes recherches svp ?
Merci
-----