
Bonjour a tous
je suis en train de fabriquer un portier automatique mais je n'arrive pas a inverser le sens de rotation du moteur
avec la photo ci jointe quelqu'un aurait il la gentillesse de m'aider
merci d'avance
Pat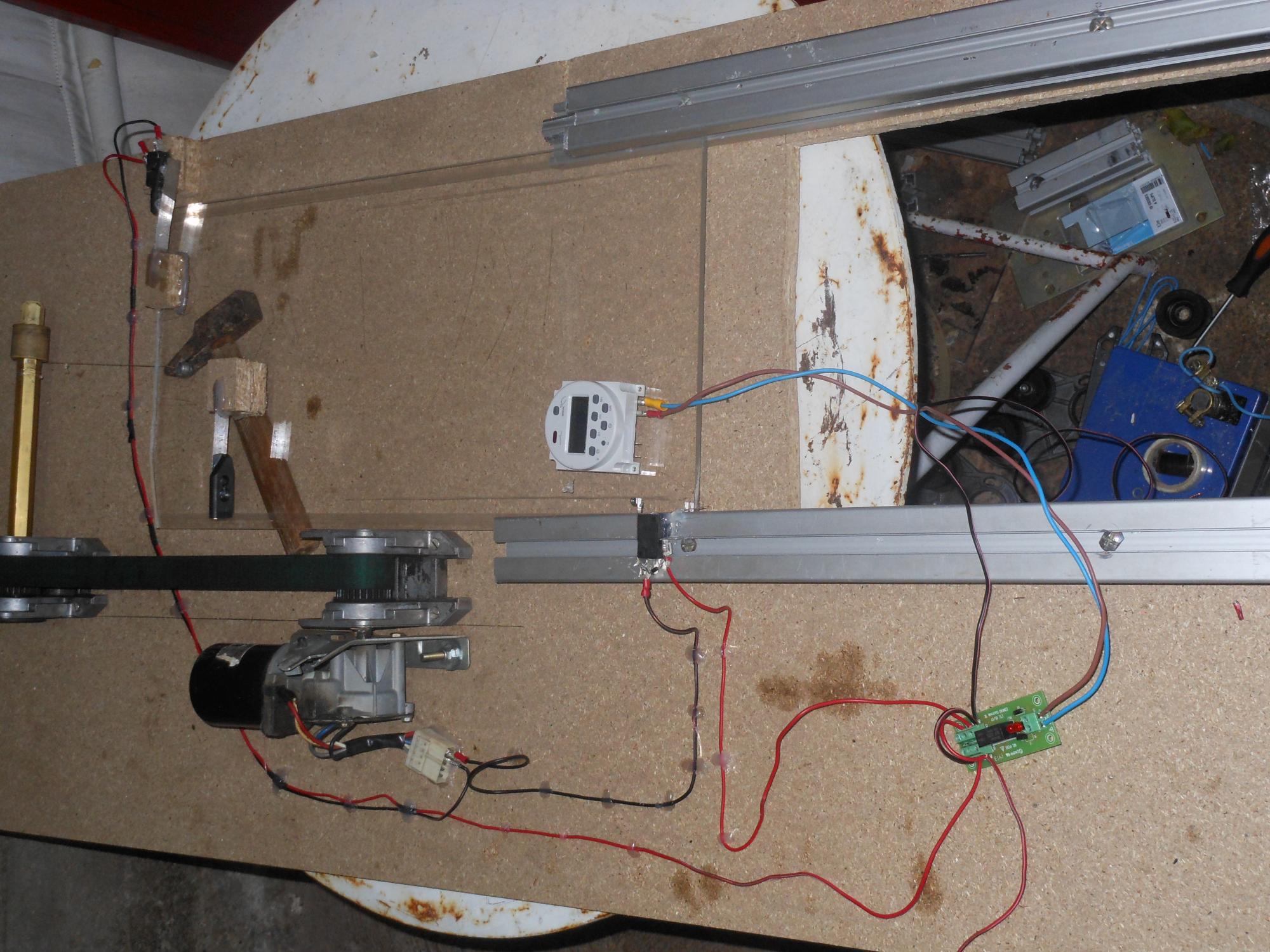
-----


Bonjour a tous
je suis en train de fabriquer un portier automatique mais je n'arrive pas a inverser le sens de rotation du moteur
avec la photo ci jointe quelqu'un aurait il la gentillesse de m'aider
merci d'avance
Pat

Salut et bienvenue sur FUTURA.
Ta photo n'est pas encore validée par les modos, mais de quel type de moteur s'agit-il ? Tu aurais un schéma électrique à nous proposer ?
Je sais pas si je dit une bêtise . mais en classe j'ai vu que pour inverser le sens du moteur il faut un pont en H.
bonjour
il s'agit d'un moteur d'essuie glasse
bonjour
Bien mais je suis débutant en la matiere donc pont h =?
C'est ceci : http://fr.wikipedia.org/wiki/Pont_en_H
En gros, si tu commandes S1 et S4, ton moteur va dans un sens, et S2/S3, il va dans l'autre sens.
Tu peux aussi utiliser un relais...
Attendons de voir le schéma global du truc...Je vois des capteurs et de la petite électronique...
Un pont en H , sa permet dinverser le sens de rotation du moteur,
http://www.telecom-robotics.org/wiki...s/CartePontEnH
regarde ce lien il a une animation avec le pond en H (moi aussi je suis débutant je pourrai pas énormément t'aider :/
Bonjour à tous,
J'ai trouvé ce schéma si ça peut t'aider. @+
oui sur la platine il y a un relais double inverseur en bas et en haut des inter de fin de course
bonjour ,
j'attends la valadité de ton schéma et je te dis
Donc il suffit à priori d'inverser les connections aux bornes du moteur...
Tu l'as câblée à partir de quoi ton installation ?
d'une baterie 12v
Nan mais je souhaite voir le SCHEMA de ton installation ! Comment sont reliés les éléments ensemble ! Sans ça on ne peut pas t'aider !
Et au niveau fonctionnement, globalement ça marche comment ? (qui décide d'ouvrir/fermer la porte ?)
bien théoriquement le programmateur.
en ce qui concerne le changement des causse du moteur , je ne pense pas car si je change la polarité de la batterie ça fonctionne.
je pense avoir un souci au niveau du branchement de la platine ou de je ne sais quoi d'autre
re bien ton schéma et surement très explicite mais pour moi c'est du chinois
Comment est câblée TON installation ? C'est toi qui a réalisé cela ?
QUE fait le programmateur ?
On ne peut pas t'aider si on ne sais pas comment ta porte fonctionne et de quoi elle est constituée !
voici un schéma
:humEPSON002.jpgEPSON001.jpgEPSON002.jpg heum
oui j'ai fait ce la par rapport a ma premiere photo de la discution
le programmateur sert théoriquement a ouvrir la porte le matin et la refermer le soir une fois mes poulette rentrée
désolé mais vraiment novice en la matiere
Voilà, on progresse !
Le truc est donc 100% automatique ? Tu n'interviens pas du tout ?
J'attends de voir les plans validés.
oui tout a Fait
merci
Ok ok, je vois le genre. Le programmateur est configuré comment ? C'est un programmateur journalier tout simple ? J'ai du mal à comprendre à quoi il sert d'après ton schéma. (4 fils qui sortent ?)
Il est actif toute la journée, ou bien seulement au moment de l'ouverture / fermeture ?
Quel est le comportement global de la machine ? Elle s'ouvre bien, mais ne redescend pas ?
Tu peux repartir du schéma proposé il y a quelques posts, mais la difficulté va être de déclencher la montée et la descente...
Bonsoir à tous,Je suppose que c'est de moi qu'il s'agit. Alors j'ai annoté le schéma pour que tu comprennes mieux.Envoyé par pat48
On va dire que le relais de commande RL3 et ses contacts c'est ton programmateur, la porte du poulailler est fermée ou en bas, le fin de course bas est ouvert, les relais RL1 Et RL2 sont au repos non alimentés.
Au matin, le programmateur actionne son contact et passe de 1 vers 2, RL2 est alimenté, ses contacts passent de 1 à 2, le moteur tourne en ouverture. Le contact du programmateur restera fermé jusqu'au soir. La porte est ouverte, le fin de course haut s'ouvre et celui du bas s'est fermé, les contacts RL2 repassent en 1. Plus rien n'est alimenté sauf ton programmateur.
Le soir en fonction de ta programmation le contact du programmateur repasse en 1, RL3 est alimenté, ses contacts passent de 1 à 2, le moteur tourne dans l'autre sens pour fermer jusqu'au déclenchement du fin de course bas, RL3 déclenche et les contacts repassent en 1.
Ceci pour l'explication du schéma, tu comprends pas, tu reviens. Par contre tes esquisses en #17, que dalle?
J'ai pas cherché pour la platine relais, peux tu donner la position des contacts et l'alimentation de la bobine. @+
Oh! excuse, j'ai oublié de joindre le schémaVoilà. @+
Bonjour Golfo57
Tu résumes parfaitement , je te remercie de tes commentaires
voici le schéma du relais , et j'ai surligné mon croqui.
bonne journéeEPSON006.jpgEPSON008.jpg
re Golfo 57
voici ce que j'ai fait avec le relais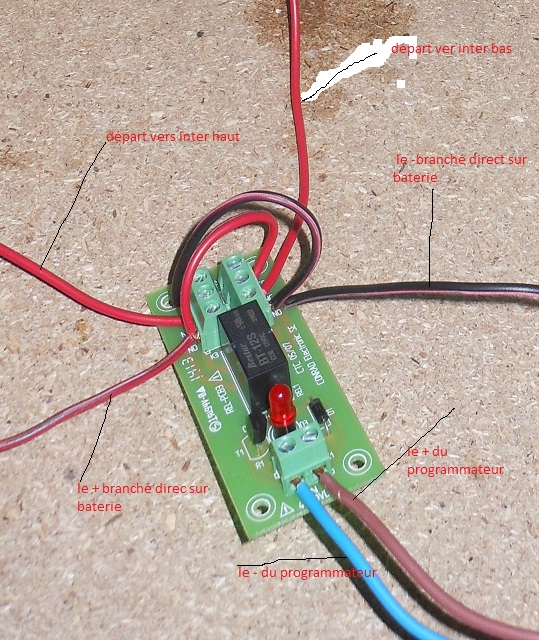
Tu pourrais faire une photo de dessous cette platine afin que l'on voie comment est câblé le relai vis à vis ce de que tu viens d'expliquer ?
bonjour Yoruk
oui mais seulement cet après midi @+
Ok. A mon avis, avec les explications très claires de golfo57, tu devrais t'en sortir.
Bonjour,
Est ce que ce moteur et à aimant permanent ?
Si stator et rotor sont bobiné, il faut inverser la tension aux bornes d'un seul enroulement. En inversant la tension aux bornes du stator et du rotor, on inverse 2 fois, c'est à dire aucune fois.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}