

Bonsoir,
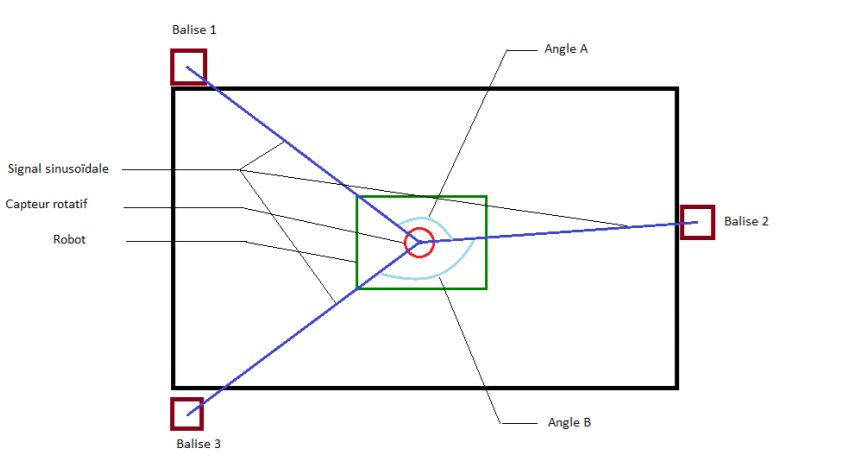
J'essaye de fabriquer pendant mon temps libre un système de repérage par triangulation destiné à un robot :Le principe est de fabriquer 3 émetteurs/récepteurs IR de fréquences différentes; chaque signal sera filtré puis lissé (par un lisseur de crête en sortie de chaque filtre) avant d'être envoyé au robot qui traitera les données.
Ce que j'ai fait : -J'ai réalisé 3 filtres passe-bande en structure de Rauch, chaque filtre à une bande passante de 1khz et les fréquences de coupure que j'ai sélectionné sont (384Hz, 1.798 kHz, 3,3 kHz avec possibilité de les modifier : elles ne sont pas optimales).
Je travaille maintenant sur un émetteur (celui associé au filtre de 384Hz), lorsqu'il sera fonctionnel, par un raisonnement analogue je pourrai l'appliquer aux deux autres.
Pour cet émetteur, j'ai donc fabriqué la fréquence IR de 38 kHz avec un NE555 Astable sur une breadboard (cette fréquence sera ma porteuse). Que je souhaite moduler à 384 Hz. J'ai donc fabriquer un autre émetteur de fréquence à 384 Hz qui me servira à moduler la fréquence de 38 kHz. Ce signal sera transmis à la LED IR puis au démodulateur de fréquence avant le filtre.
Ma question est la suivante : Pour fabriquer cette fréquence modulée, faut-il que je connecte le NE555 qui émet la porteuse sur le NE555 qui émet la fréquence que je souhaite avoir (384 Hz) ? Ou l'inverse; connecter le NE555 de la fréquence souhaitée sur le NE555 de la porteuse. Comment les connecter entre eux, un simple fil, condensateur/résistance ?
Merci de votre temps et de vos réponses, bonne soirée
-----
 .
.



{kind=link}