
Bonjour ;
comment calculer la vitesse de rotation de la manivelle.?
la vitesse du pont B est de : 8xLx θ/s
-----

Bonjour ;
comment calculer la vitesse de rotation de la manivelle.?
la vitesse du pont B est de : 8xLx θ/s
La vitesse du point B ne peut pas être constante.
De plus, est-on censé savoir ce que représente L et s ?
Dans l'absolu, la réponse à ta question est : "En réfléchissant", mais ce ne serait pas gentil de dire ça...
Salut
L' ami Abou_Sofiane nous fait un gros mélanges entre grandeur physique (temps) et unité (s)
La vitesse circonférentielle du point B , c' est évidement sous forme scalaire :
DB*dθ/dt
"θ/s" serait dons une confusion avec la vitesse angulaire dθ/dt
"L" serait donc égal à DB/8 ??
Mais je ne suis pas Champollion , ce n' est que mon interprétation .
mm,
la vitesse du levier 3 est de : 2 Cycles/min, un cycle vaut: 4θ
Bonjour,
Ne serait-il pas plus simple de donner l'intégralité de l'énoncé ?
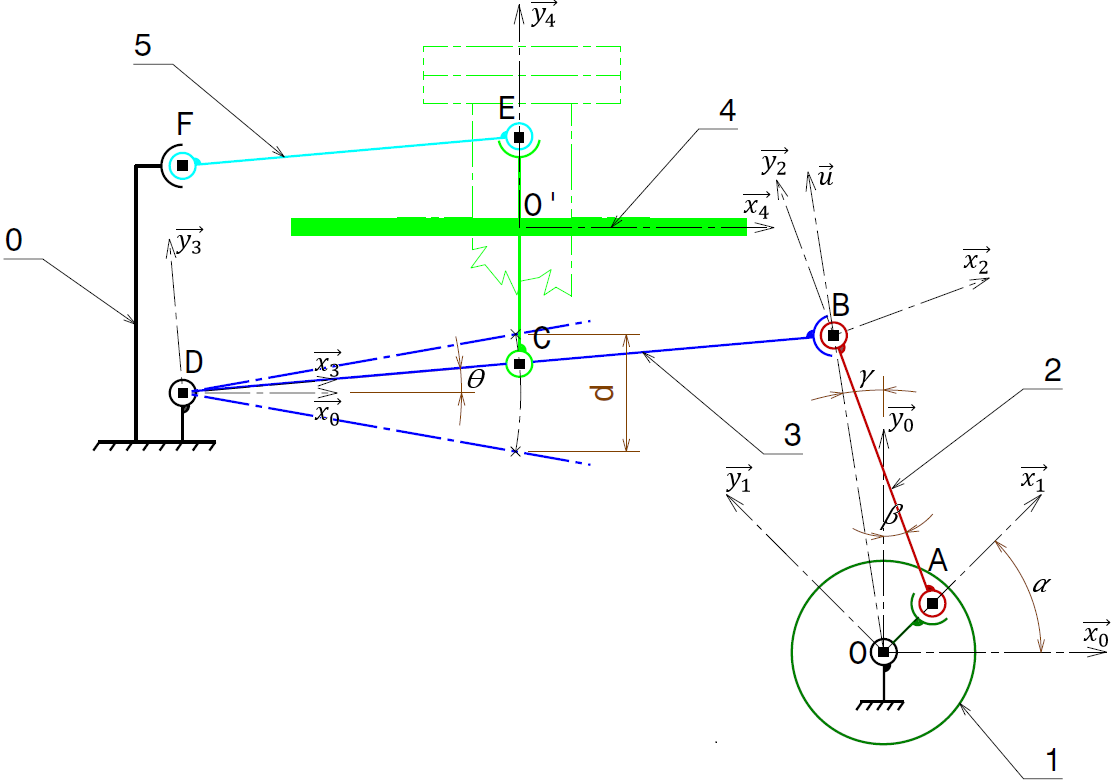
0 : Bâti.
1 : Manivelle de rayon OA = e
2 : Bielle de longueur AB = l = 500mm
3 : Levier d’oscillation de longueur DB = L = 1200mm et de centre de d’inertie C.
4 : Table de lingotière.
Soit R0 (O ;(x_0 ) ⃗,(y_0 ) ⃗,(z_0 ) ⃗) : un repère orthonormé direct lié au bâti (0).
Soit R1 (O ;(x_1 ) ⃗,(y_1 ) ⃗,(z_1 ) ⃗) : un repère orthonormé direct lié à la manivelle (1).
Soit R2 (B ;(x_2 ) ⃗,(y_2 ) ⃗,(z_2 ) ⃗) : un repère orthonormé direct lié à la bielle (2).
Soit R3 (D ;(x_3 ) ⃗,(y_3 ) ⃗,(z_3 ) ⃗) : un repère orthonormé direct lié au levier d’oscillation (3).
Soit R4 (D ;(x_4 ) ⃗,(y_4 ) ⃗,(z_4 ) ⃗) : un repère orthonormé direct lié à la table d’oscillation (4).
L’orientation de la manivelle par rapport au bâti est définie par l’angle α(t) tel que :
dα/dt = α ̇ = ω = cte.
L’orientation de la bielle par rapport au bâti est définie par l’angle β(t) tel que :
dβ/dt = β ̇.
L’orientation du levier d’oscillation par rapport au bâti est définie par l’angle θ(t) tel que :
dθ/dt = θ ̇.
La position du point B par rapport au bâti est définie par le vecteur (OB) ⃗ tel que :
(OB) ⃗= x(t)∙u ⃗.
L’orientation du vecteur (OB) ⃗ rapport au bâti est définie par l’angle γ(t).
L’amplitude d’oscillation de la table de lingotière : d = 〖20〗^(±3)mm.
La fréquence d’oscillation de la table de lingotière : f = 〖120〗^(±20) cpm (cycle par minute).
θ étant d' après l' image un angle variable en fonction du temps , je ne vois pas comment ça pourrait donner une vitesse .Envoyé par Abou_Sofiane

Nawak
Solution 1
Partir de :
OA = OD+DB+BA (somme vectorielle)
Un bon petit exercice de frigo !
Solution 2
Dégainer le logiciel CAO , esquisser le système .
Faire varier α par pas de Δα et mesurer le Δθ
Si le pas est assez petit , tu peux considérer que :
dθ/dt = ω.Δθ/Δα
Solution 1 donne 2 équation et 3 inconnus ?
pour la solution 2,
.?et si j'ai la variation de alpha en fonction de θ
la seul donnée que j'ai c'est que la fréquence de la table 4 est de 120 cycle /min,Dynamix
et bien sur les dimension de chaque pieces
En éliminant β tu obtiens θ en fonction de α
Je suppose que la vitesse du moteur est constante et que c' est θ qui ne l' est pas .
Tu as toi même écrit : ω = cte
Chaque cycle correspond à un tour moteur ?
Si oui , la vitesse du moteur est de 120 tr/min
Donc ω = 12,6 rad/s
MERCI bcp, et je m'excuse pour le dérangement,
C'est ce que je pensais aussi, mais il y a des points très discrets après le nom des variables:
Logiquement, il a voulu écriredα/dt = α ̇
.....
dβ/dt = β ̇
....
dθ/dt = θ ̇mais le copier/coller a dû mal se passer...
Oui oui, :
Sur un site francophone il vaut mieux écrire α' si on veux être sur d' être compris .
Et c' est plus simple que d' utiliser le caoutchouc