
salut tt.
j'ai essayé de commander un moteur sans balais (brushess motor) à l'aide de pic 16f84a + 6 mosfet canal N ,mais j'ai rencontré un pb ..
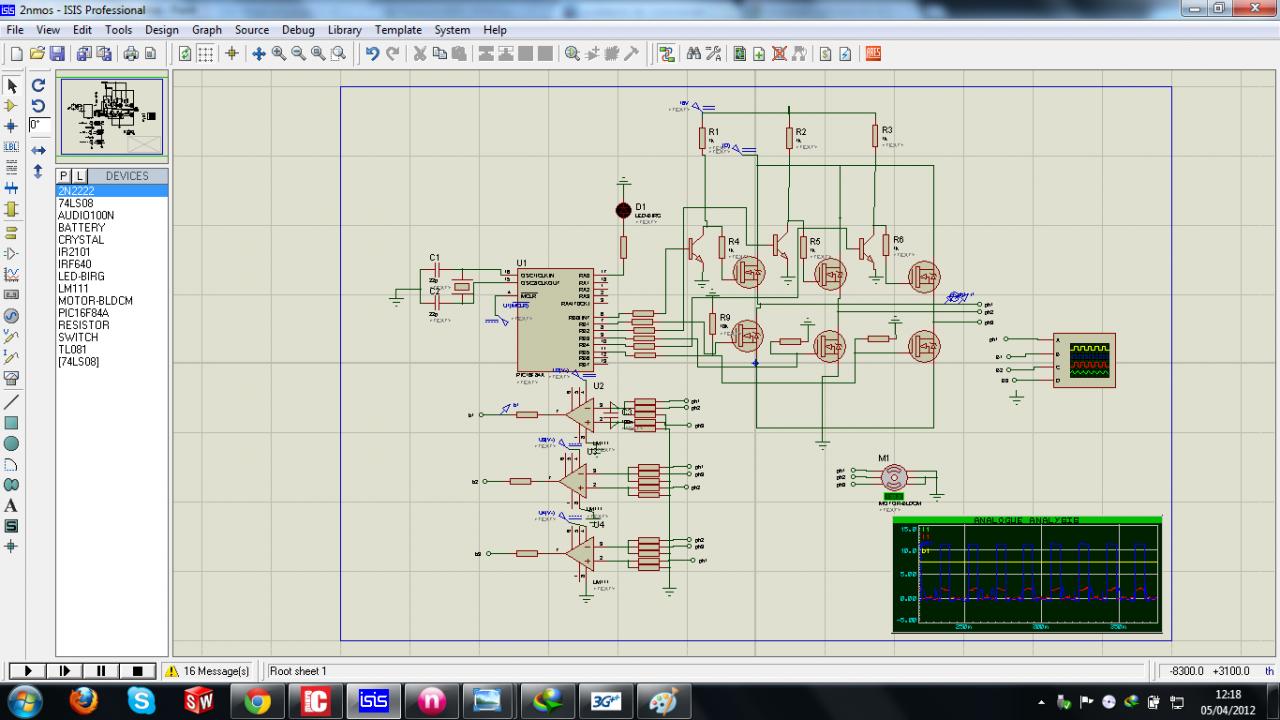
le montage est ici :
-----


salut tt.
j'ai essayé de commander un moteur sans balais (brushess motor) à l'aide de pic 16f84a + 6 mosfet canal N ,mais j'ai rencontré un pb ..
le montage est ici :
Et c'est quoi le problème ?
Le schéma n'est pas encore validé.
les signaux obtenus :
alors que les signaux qu'il faut les generer sont :
C'est peut être un problème de soft.
Images toujours pas validées.
Selon toi, pour une phase, à quelle configuration d'un bras du pont doit correspondre les états "haut", "inermédiaire" et "bas" du chronogramme que tu donnes ?
Tout existe, il suffit de le trouver...!
@Qristoff :
ces sont les signaux d'alimentation de moteur.
c quoi ta question?
sans blagues....ces sont les signaux d'alimentation de moteur.
Selon toi, pour une branche du pont, quel doit être l'état des transistors haut et bas lorsque une phase prend l'état "haut", "intermédiaire" et "bas" ?
trois réponses attendues....
Tout existe, il suffit de le trouver...!
etat haut : mos1: on (fermé)
mos2: off (ouvert)
etat inter : les 2 transistors sont off (à l'air)
etat bas :mos1: off (ouvert)
mos2: on (fermé)
remarque :
les 2 mosfet fermés à la fois est un courcircuit..
OK, bien répondu.
Maintenant, de combien de phases de commandes distinctes peut se découper la séquence compléte pour le pont entier ?
Essaie de faire un tableau avec en ordonnée, les six commandes de transistors et en absisse, les phases de commandes pour une séquence compléte. Fini par remplir le tableau avec des on et des off pour chaque transistor.
Tout existe, il suffit de le trouver...!
oui tout est clair
mais lorsque je commande les transistors avec le pic j'obtiens les signaux fausses.
je pense que le pb aux transistors mais c koi exactmnt ????
le probléme vient de la simulation. Enléve le moteur et remplace chaque phase par un pont de résistance 10K/10K entre le V+ et le gnd. Tu verras appraitre les états intermédiaires si ton séquencement est OK.je pense que le pb aux transistors mais c koi exactmnt ????
Tout existe, il suffit de le trouver...!
le pb reste , la partie bas de signal ne peut pas etre generée avec alimentation entre +Vcc et gnd.????
Le problème c'est surtout que tu fais la mesure entre la masse et le point milieu des transistors. Du coup tu ne pourra jamais voir apparaitre une tension négative, quelque soit les signaux que tu appliques aux transistors.
Quelqu'un a dit à un jour "tout est relatif" : la vision que l'on a des choses dépend du point d'observation.
En se référencant au gnd et en plaçant un pont de deux résistances de 10K entre le V+ et le Gnd, avec le point millieu relié à une phase. Tu pourras observer les trois valeurs de tension: V+, V+/2 et Gnd puisque ta mesure est référencée au Gnd.Envoyé par mizzovic88

Ensuite, c'est une questoin de convention de signe du signal pour chacune des phases. Suivant le séquencement complet des trois phases, les bobines se trouverons alimentées soit dans un sens (positif) soit dans l'autre sens (négatif) à tour de rôle.
Tout existe, il suffit de le trouver...!

slt
merci bp pour vos reponse ,
mais en pratique le moteur vibre puis tourne lentement , j'ai augmenté la frequence le moteur se bloque ...!!!!
Salut,
T'as changé de pseudo ? pas de sexe, j'espère !
Maintenant que je vois ton schéma:
- les mos du bas doivent être connectés (les sources) au 0V et non pas -12V !
- les mos du bas doivent être de type logique car ils sont pilotés directement par le pic
- la différence de tension +16V (commun des commandes de grille) et phases moteurs (tensions sources des transistors) est insuffisantes. Pour bien bloquer ton mos, il faut que la tension Vgs soit de l'ordre de 10V. C'est à dire la tension de phase montera difficilement au dessus de 6V en positif. Je te conseille soit d'utiliser des Mos-P, soit utiliser un driver de mos avec bootstrapp.
Tout existe, il suffit de le trouver...!
de meme si je relie les mos de bas avec la masse je n'obtiens pas la partie negative , seule 12V et 0V.
a propos driver j'ai trouvé dans qlq projet n'utilse pas ces drivers , controle direct par pic...
post #14 et #15 à relirede meme si je relie les mos de bas avec la masse je n'obtiens pas la partie negative , seule 12V et 0V.
peut être utilisent t-ils des Pmos ! la configuration que tu as fait ne fonctionne pas sans driver bootstrap...c'est à dire que la tension de grille monte à au moins une tension V au dessus du rail qui permet de bloquer les mos du haut.a propos driver j'ai trouvé dans qlq projet n'utilse pas ces drivers , controle direct par pic...
Donne moi les références de tes mos...
Tout existe, il suffit de le trouver...!
n mosfet IRF640
Bonjour,
C'est bien ce que je pensais, ce n'est pas un Mos "logique".n mosfet IRF640
Ensuite, à quelle fréquence PWM veut tu faire tourner le pont ? et le PWM attaque les mos du haut, ceux du bas, ou les deux en même temps ?
Tout existe, il suffit de le trouver...!
bonjour
le irf640 est le seul disponible maintenant , que peut on faire?
frequence est de l'ordre de 50Hz...
C'est assez agaçant de voir que tu ne réponds qu'à la moitié des questions....
Comment se fait l'attaque PWM du pont, uniquement sur les mos du haut avec le mos du bas en statique, le contraire ou bien les deux pilotés en PWM simultanément ? car cela influe sur la configuration des drivers de pont
50Hz, c'est vraiment un peu bas pour une fréquence PWM !
Tout existe, il suffit de le trouver...!
pwm attaque les mos du haut et du bas, avec un rapport 100%.
j'ai trouvé que la periode ne doit jamais depasser 20ms => frequence 50hz
OKpwm attaque les mos du haut et du bas
cela veut dire quoi 100%, le rapport cyclique d'un PWM varie de 0% à 100% avec certaines limitations d'utilisation liés aux composants.avec un rapport 100%
donc, elle peut être plus petite, donc la fréquence plus élevée....j'ai trouvé que la periode ne doit jamais depasser 20ms => frequence 50hz
Je te conseille de passer franchement à 10kHz ! en plus à 50Hz, le module CCP (pour générer le PWM) de ton pic doit batailler un peu....
Tout existe, il suffit de le trouver...!
salut
comment exploiter le signal bemf ?
Salut,
La détection du BEMF est utilisé pour piloter les brushless sans capteurs de position (Brushless Sensorless). La méthode est beaucoup plus ardue qu'avec capteurs hall, résolveur ou codeur incrémental. Tu peuxx te renseigner sur le web mais je crains que cela dépasse tes compétences. Essaie déja de le faire tourner avec des capteurs...
Si ça t'intéresse, tu peux lire cela
Tout existe, il suffit de le trouver...!
mais comment faire pour d'abord pour tourner sans faire la variation de vitesse .je veux avoir la vitesse max..
en simuation la vitesse faible 220rpm .????
salut
j'ai essayé de faire un schema, a partir des travaux sur le web, pour recuperer le signal bemf ...
Sans titre.jpg
j'ai trouvé les signaux suivantes :
bemf.png
?????



{kind=link}
{kind=link}