


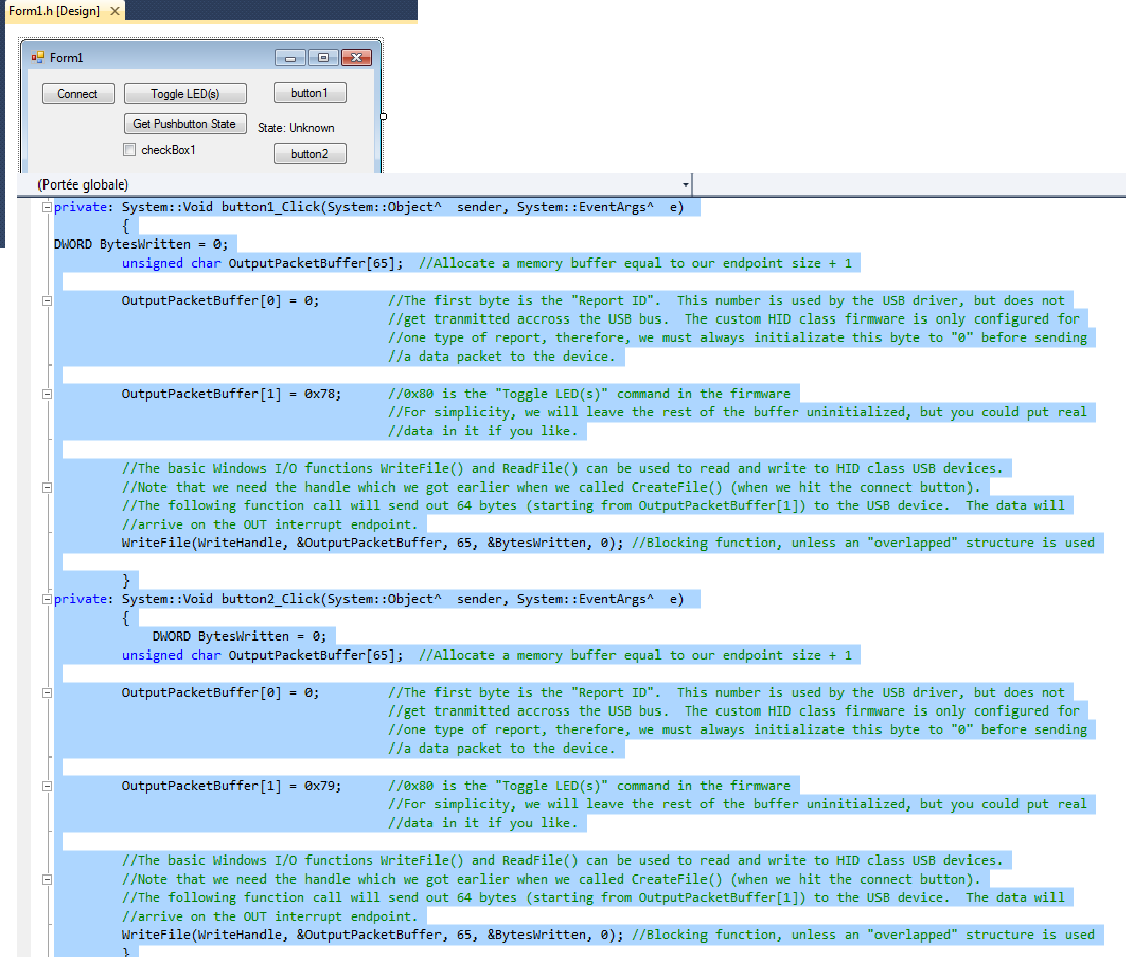
Bonjour ,ayant déjà avancé dans mon projet consistant à commander un moteur pas à pas unipolaire, nous devons désormais commander ce moteur par le biais de notre PIC18F4550 avec son bootloader HID par USB. On va devoir créer une interface en visual c++ (comme l'exemple dans microchip_solutions/USB/Device_HID-Custom Demos/ puis Simple Demo-Windows Software) j'ouvre le fichier .sln pour voir la form dans Visual C++ Express, étant novices en c++ je souhaiterais si possible que vous m'expliquiez par étapes comment réaliser les actions ci-dessous:
Faire un programme permettant de contrôler notre moteur pas à pas unipolaire en deux sens de rotation (on sort de notre pic par 4 sorties pour aller sur un ULN2803 et ensuite sur notre moteur pour infos) en C++ avec une fenêtre du type de l'exemple fournit par Microchip.
Je vous remercie d'avance de votre aide et de vos conseils
-----

{kind=link}
{kind=link}