


Bonjour !
Je ne suis pas sur que ce soit le bon endroit pour ce post, mais la régulation PID est souvent liée à l'électronique alors...
J'ai un examen de systèmes asservis dans une bonne semaine et nous n'avons que quelques très vagues notes de ce qu'il a raconté (merci les profs consciencieux), mais heureusement on a une liste de questions. Je vais donc essayer d'y répondre et de poster mes questions ici
QUESTION 1
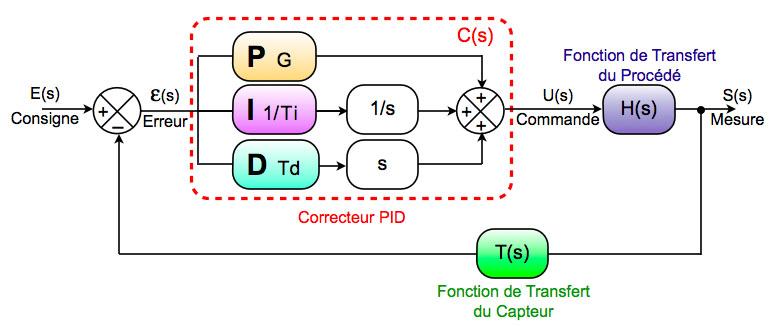
Tout d'abord, on nous demande: "Décrivez comment se comporte un régulateur PID dans une boucle en régime stabilisé. Dessinez la boucle et les trois composantes du régulateur."
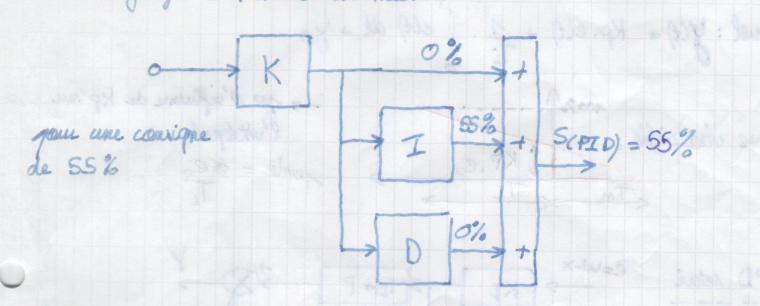
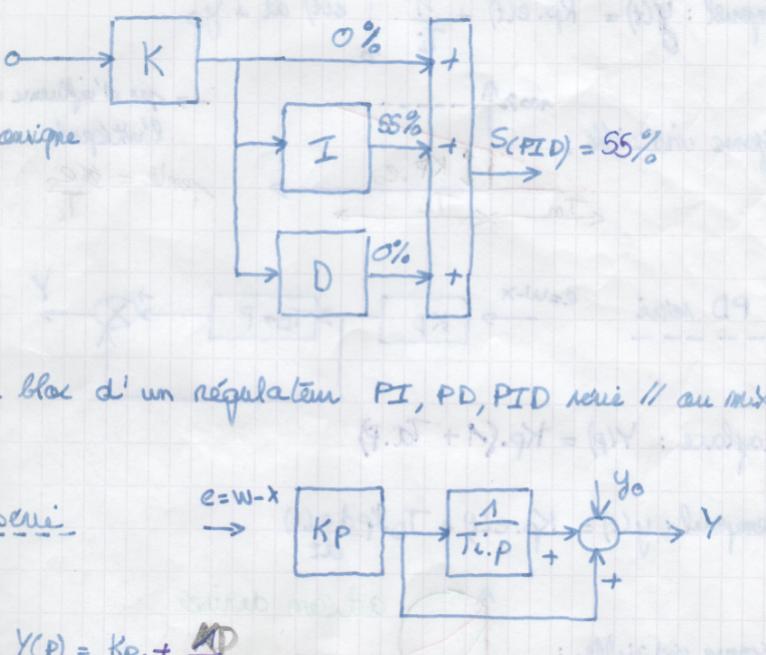
Bon le dessin ça va (j'ai fait celui d'un système mixte vu que rien n'est précisé).
Mais je ne comprend pas pourquoi c'est le I qui donne les 55%...
-le P est de 0 car on multiplie l'erreur (0) par une constance donc on à 0
-le D idem car pente nulle
-mais je ne comprend pas le fonctionnement du I. On intègre pour une durée définie ? Ou il intègre depuis le début du process ? Comment se retrouve-t-on avec 100% de la commande sur uniquement le I en régime stable?
Merci beaucoup d'avance
-----

 )
)
{kind=link}
{kind=link}