

Bonjour à tous;
Je travaille actuellement sur un projet de déclenchement de parachute embarqué sur les drones . Le fonctionnement est le suivant :
Un boitier est embarqué sur le drone, un autre reste au sol, en cas d'anomalie on appuie sur un bouton darrêt d'urgence qui envoie l'info par liaison radio au boitier embarqué déclenchant ainsi la rotation d'un servomoteur qui libère un parachute.
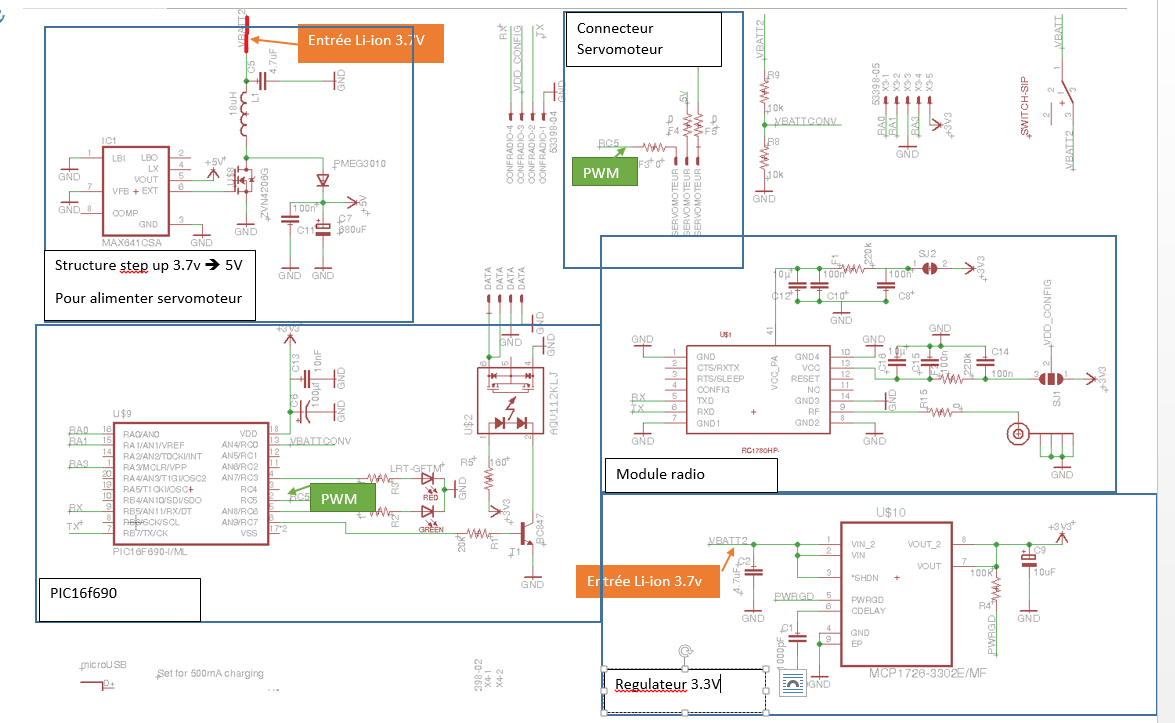
Lélectronique du boitier embarqué se compose d'un module radio (868 mhz-500 Mw) émettant un caractère à 1 hz environ (ce caractère est réceptionné sur le boitier récepteur pour contrôler la liaison radio), il est envoyé par un pic16 f.
Ce pic contrôle également le PWM du servomoteur, la commande d'un relais et teste également si un caractère et reçu ( signalant le déclenchement du parachute émis par le boitier au sol)
Seulement j'ai un problème d'ordre CEM, puisque le servomoteur de façon aléatoire saccade au même rythme que l'envoi du caractère.
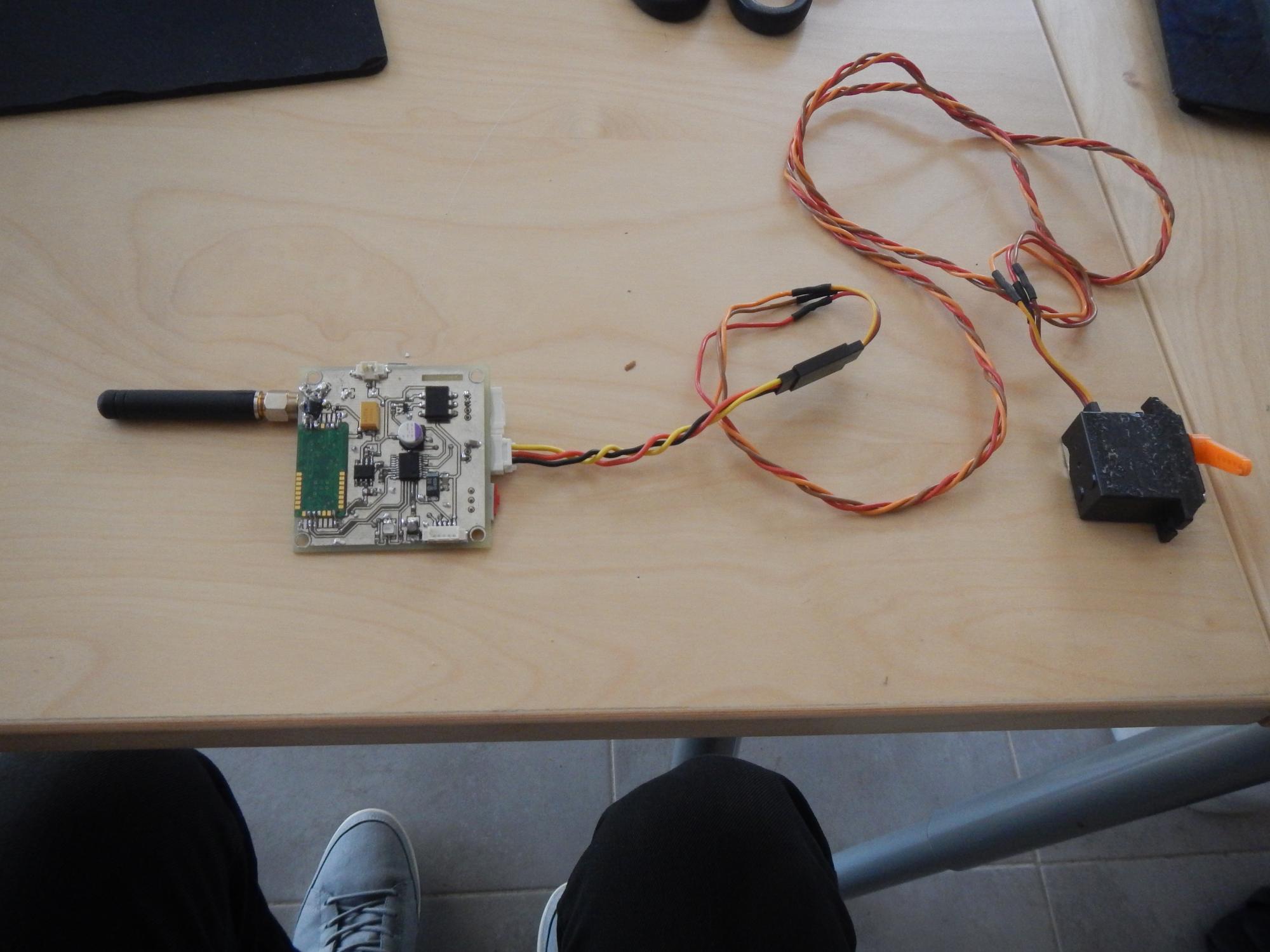
J'ai pu réaliser plusieurs tests en séparant la commande PWM et l'alimentation du servomoteur de la carte afin d'isoler le servomoteur de mon montage ==> Légère amélioration mais problème persistant
Mise en place de deux ferrites sur le cordon du servomoteur ==> pas damélioration
J'ai également entouré de feuilles d'aluminium le fil du servomoteur ainsi que le servomoteur le tout relié a la masse ==> plus de problème
Donc ma question est la suivante, est-il possible de se prémunir de ses perturbations récupérées par le servomoteur au niveau de la conception du circuit ? Mise en place de ferrite sur le PCB, découplage du signal, alimentation ?
Ou la seule solution est le blindage du câble (moyen très contraignant)
Je vous remercie d'avance
-----


{kind=link}
{kind=link}