Bonjour,
Nouveua sur le site,
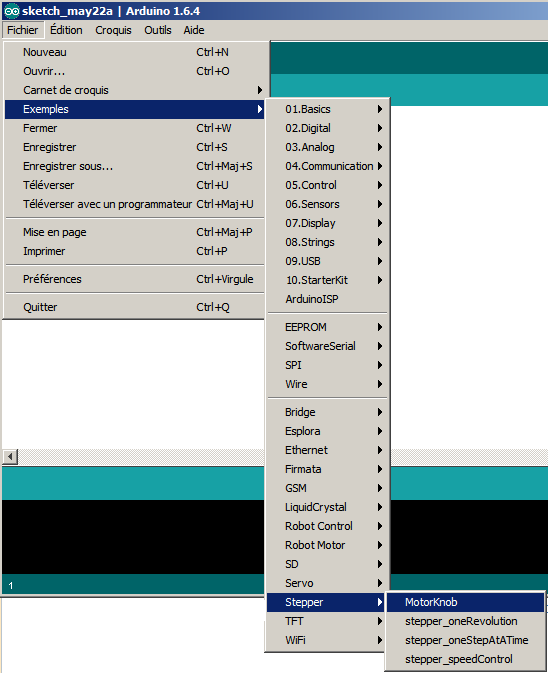
Je suis à la recherche d'un code pour Arduino uno ou atmega sachant que mon projet consiste à :
Sur un Axe X :
- Déplacement d'une platine sur une vis sans fin entraînée par un moteur NEMA 17 sur 50 cm environ
- pilotée par un Joystick Axe x pour piloter la vitesse;
- pilotée par un Joystick Axe y pour piloter l'avancement ou le recul;
Butée de fin de course à chaque extrémité ( matériel à définir).
D'avance,
Merci
-----