


bonjour à tous,
je suis actuellement en train de travailler sur des capteurs de smartphones afin de déterminer la situation de ceux-ci.
Je commence tout d'abord par déterminer la situation initiale du smartphone à l'aide de l'accéléromètre, puis j'étudie les variations de vitesses angulaires à l'aide du gyroscope.
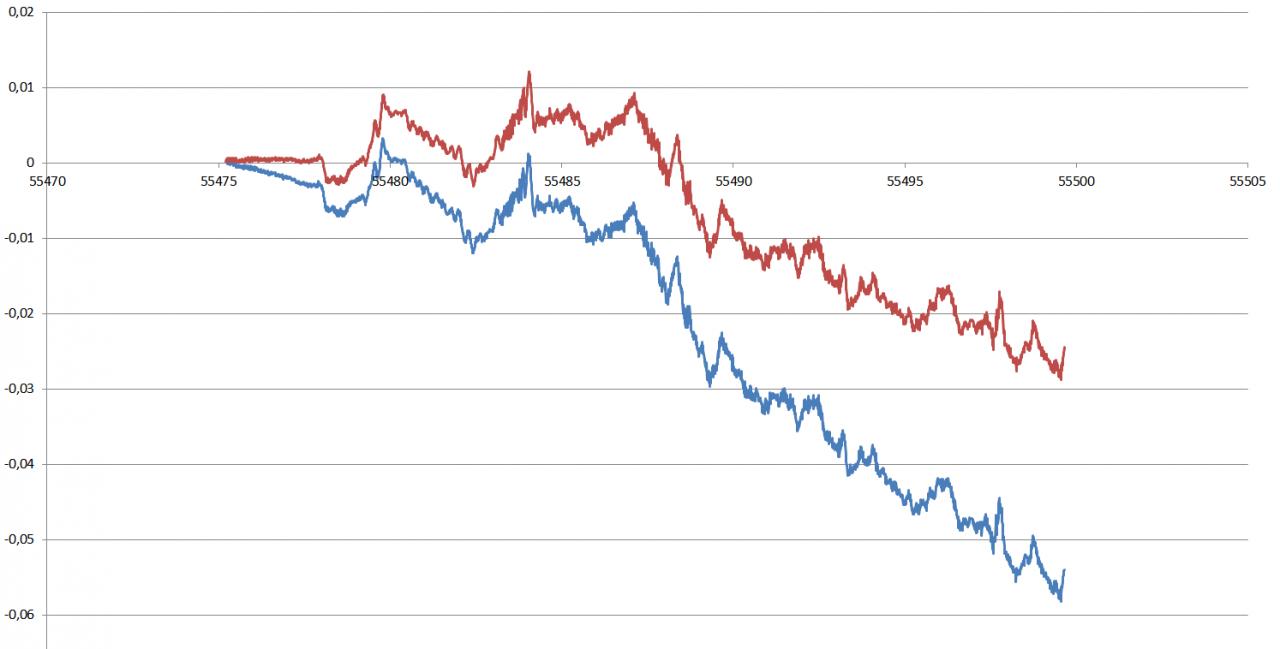
Le problème que je rencontre est assez embêtant car j'observe une dérive de l'angle suite à l'intégration du signal du gyro:
pitch biased.PNG
Cette variation d'angle devrait toujours se situer aux alentours de l'angle initial (ici 0 radians). Sur ce test, l'offset du signal gyro a été supprimé sur les données brutes (on a retiré la valeur moyenne du signal au repos)
Comme solution, j'ai pensé à compenser les mesures avec le coefficient directeur du signal total :
pitch sans coeff directeur.jpg
Mais on subit toujours une dérive car le point final du test devrait être le même que celui de départ et je n'arrive pas à l'expliquer.
Si vous connaissez une solution afin d'avoir un angle sans dérive à l'aide d'un gyro je suis preneur ^^.
je commence vraiment à devenir dingue (si ça se trouve ce n'est tout simplement pas possible).
bonne journée.
{kind=link}
{kind=link}
-----