

Bonjour à tous,
Après quelques recherches sur le forum je n'ai pas trouvé de réponses à mon problème
Je contrôle un moteur DC dans les deux sens via un pont en H. Pour détecter la position du moteur et changer son sens de rotation, j'ai créé une butée mécanique. Le but est de détecter un pic de courant sur le moteur au moment de la butée et de changer son sens avant la destruction du moteur ou de la butée
Pour les curieux voici le montage:
montage_mot_dc.png
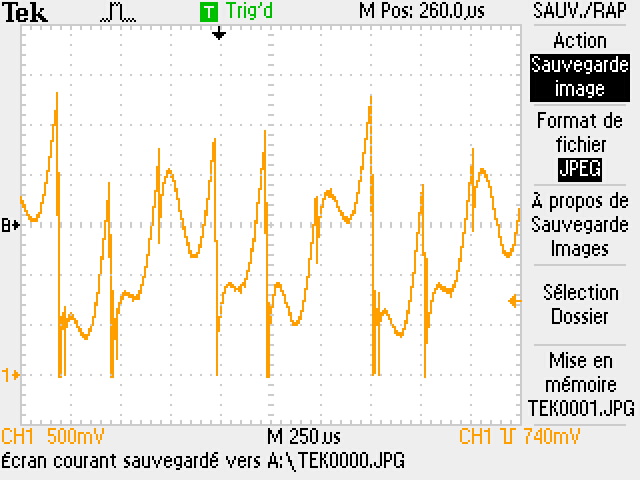
Pour détecter cette butée, j'utilise un shunt + ampli et j'obtiens ce signal:
TEK0001.JPG
J'imagine que les différents pic tout les 500us correspondent au changement de pôles du moteur.
Ce signal est difficilement exploitable par mon micro car je peux lire une valeur comprise entre 0V et 3V alors que le moteur est libre et pas encore en effort et ne peux donc pas savoir dans quel état il se trouve.
A l'ampèremètre je lis un courant de 60mA lorsque le moteur est libre et un courant d'environ 80mA lorsque mon moteur est en effort (contre mes doigts).
Le but était donc de traduire ce courant et de l'amplifier pour obtenir une valeur par exemple de 1.2V correspondant à mes 60mA et de détecter le passage à 1.8V correspondant à mes 80mA lorsque mon moteur est en effort.
La question est donc comment filtrer/utiliser le signal plus haut pour faire cette détection de courant par mon ADC du micro?
Merci par avance pour vos réponses/conseils.
Geoffrey


{kind=link}
{kind=link}
-----