

Bonjour à tous,
étant bloqué sur un sujet, je me permets de demander votre aide,
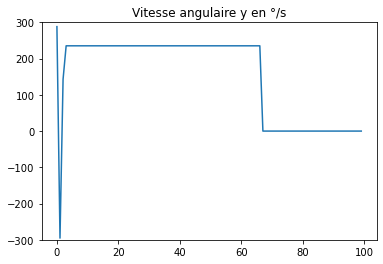
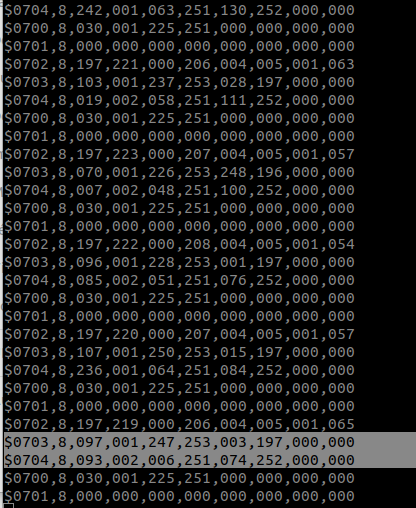
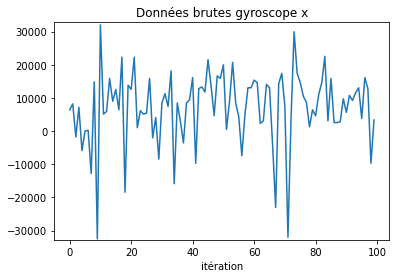
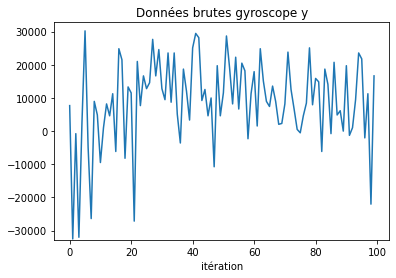
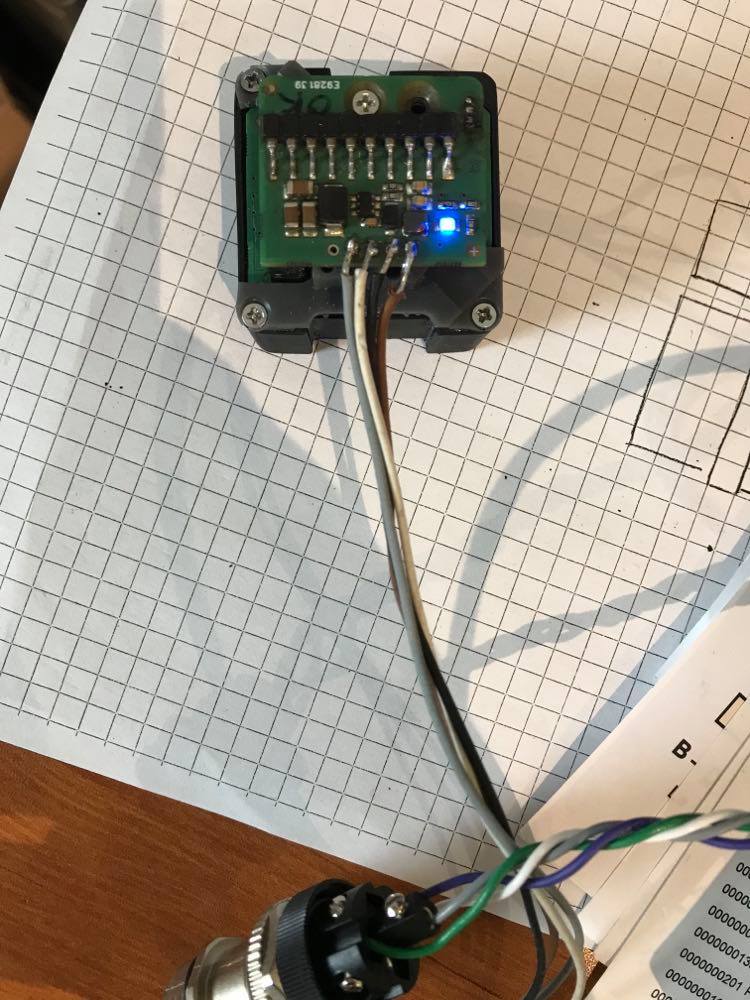
J'essaie actuellement d'utiliser un capteur composé de 3 gyromètres et 3 accéléromètres (le LM6DS3), les trames comprenant les données des capteurs sont envoyés via un CAN et je les reçois directement sur mon PC par un port USB (n° trame 703 et 704 pour gyro et accelero). De ce fait j'arrive à les lire sur spyder en langage Python puis à les traiter (passage en binaire, complèment à 2 puis en données décimales). Malheureusement les résulstats que j'obtiens me paraissent incohérents (disponible dans les pièces jointes).
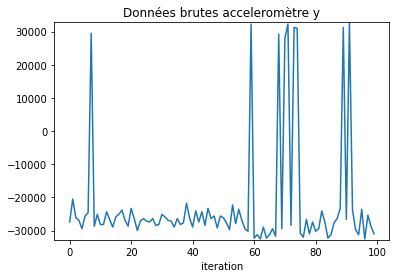
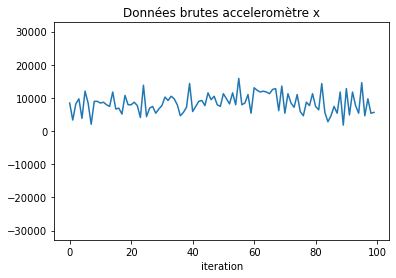
En effet, en laissant le capteur immobile (sans le toucher ou le déplacer), les données varient énormement, j'ai essayé de revoir tout mon programme mais il me paraît cohérent. de même j'ai changé le capteur mais j'obtiens la même chose,
Car techniquement si je ne touche pas le capteur les vitesses linéaires et les accélérations doivent être nulles (issues des gyro et accéléro),
Etant à court d'idée je me suis donc permis de vous énoncer mon problème, si jamais quelqu'un aurait une piste sur d'où est-ce que le problème peut venir je suis preneur,
merci à vous,
minicom.pngdonnee_accelero_y.pngdonnee_accelero_x.pngdonnee_gyro_x.pngdonnee_gyro_y.png
-----
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}