

Bonjour, je suis en 2ème année de CPGE (TSI) et mon TIPE porte sur le déplacement d'un robot :
Mon TIPE est basé sur le robot air-cobot de la société Airbus servant à analyser certaines parties de l'avion devant être vérifié avant décollage. L'expérience que je souhaite réaliser serait de programmer en Arduino le déplacement d'un petit robot qui aurait pour but de se placer devant un cercle puis d'avancer.
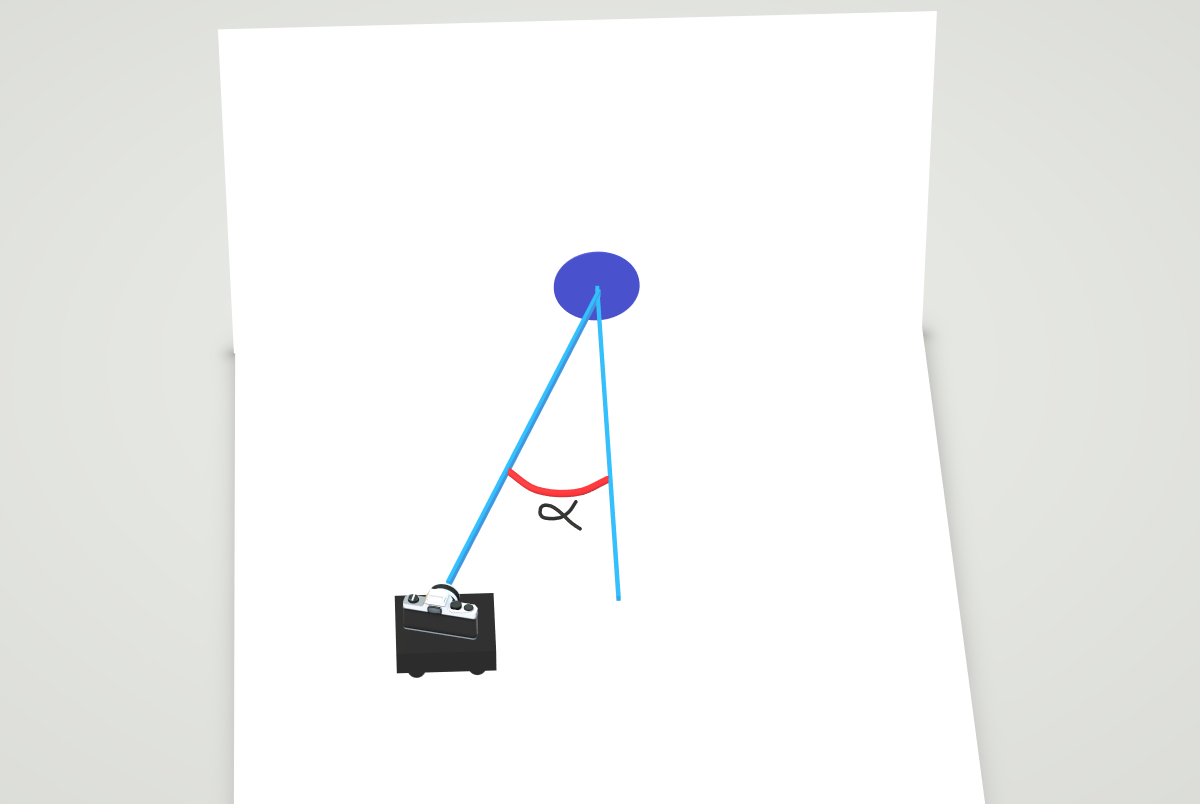
Évidemment, le cercle ne sera pas en face du robot mais décalé d'un certain angle. Dessin illustratifpng.png
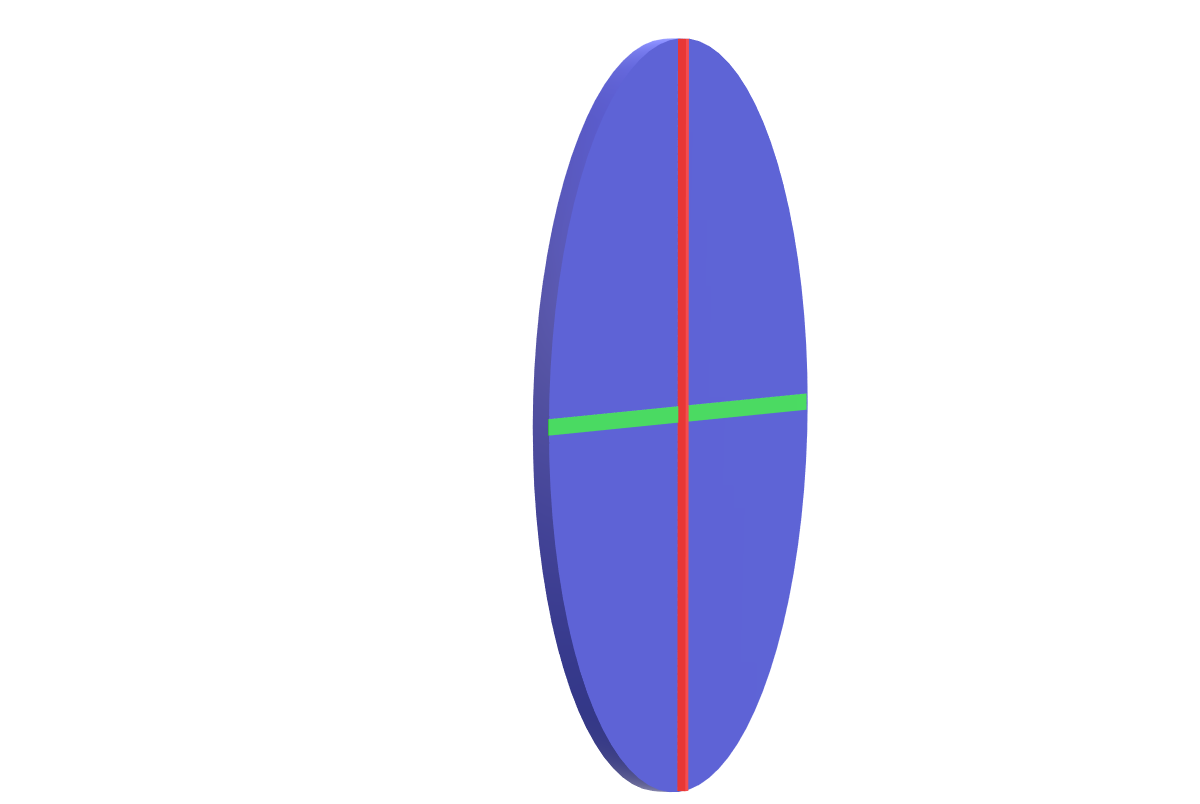
En sachant qu'un cercle vu de côté est semblable à une ellipse, grâce à une analyse d'image avec Python je pourrais connaitre la largeur et la hauteur de l'ellipse Cercle vu de côté.png , serait-il possible de connaitre l'angle entre mon robot et une normale traversant le cercle pour pouvoir le déplacer en face du cercle ?
Merci d'avance
{kind=link}
{kind=link}
-----