

Bonsoir,
J'essaie décrire un programme pour déterminer le cheminement d'un robot tondeuse dans un terrain.
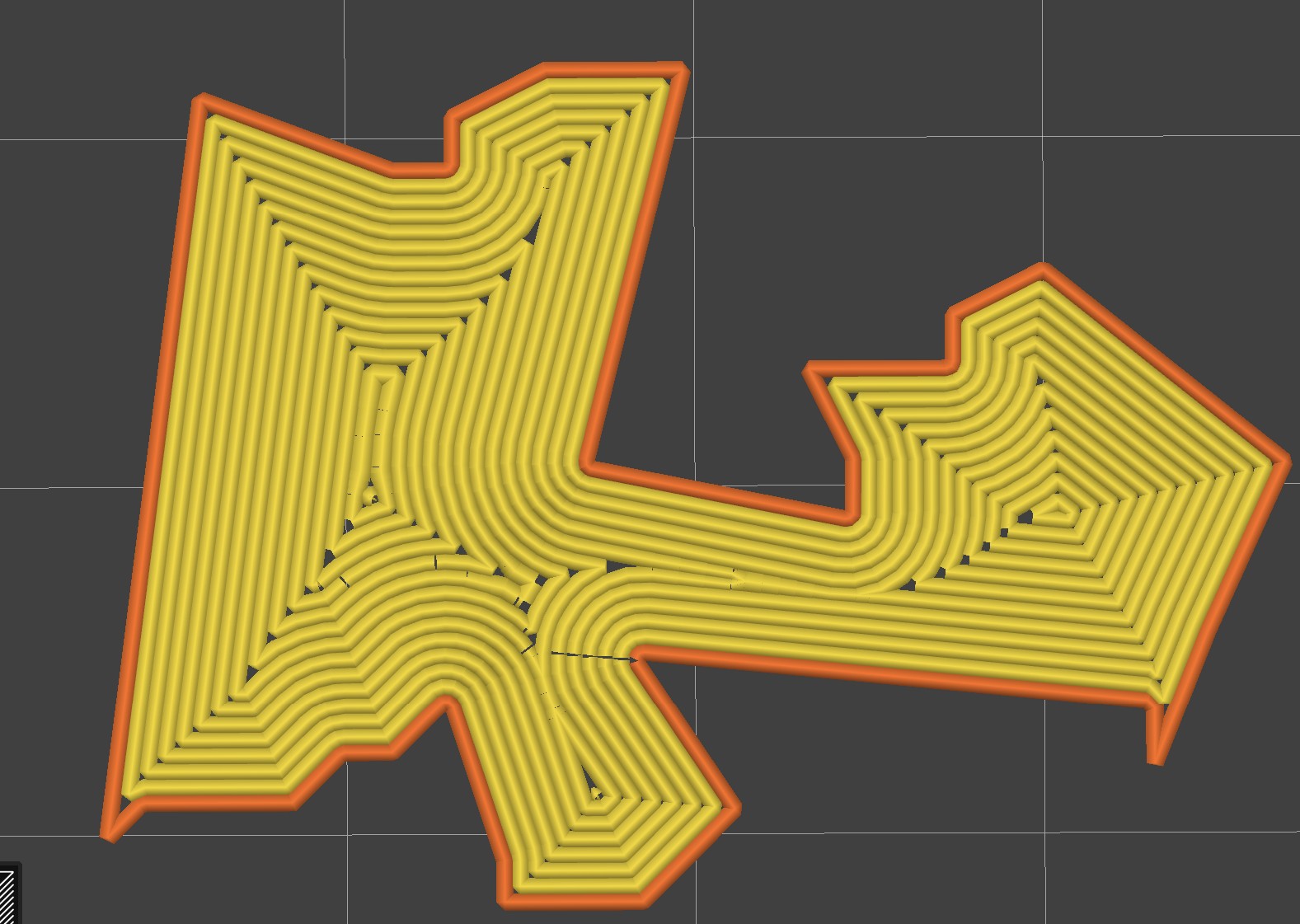
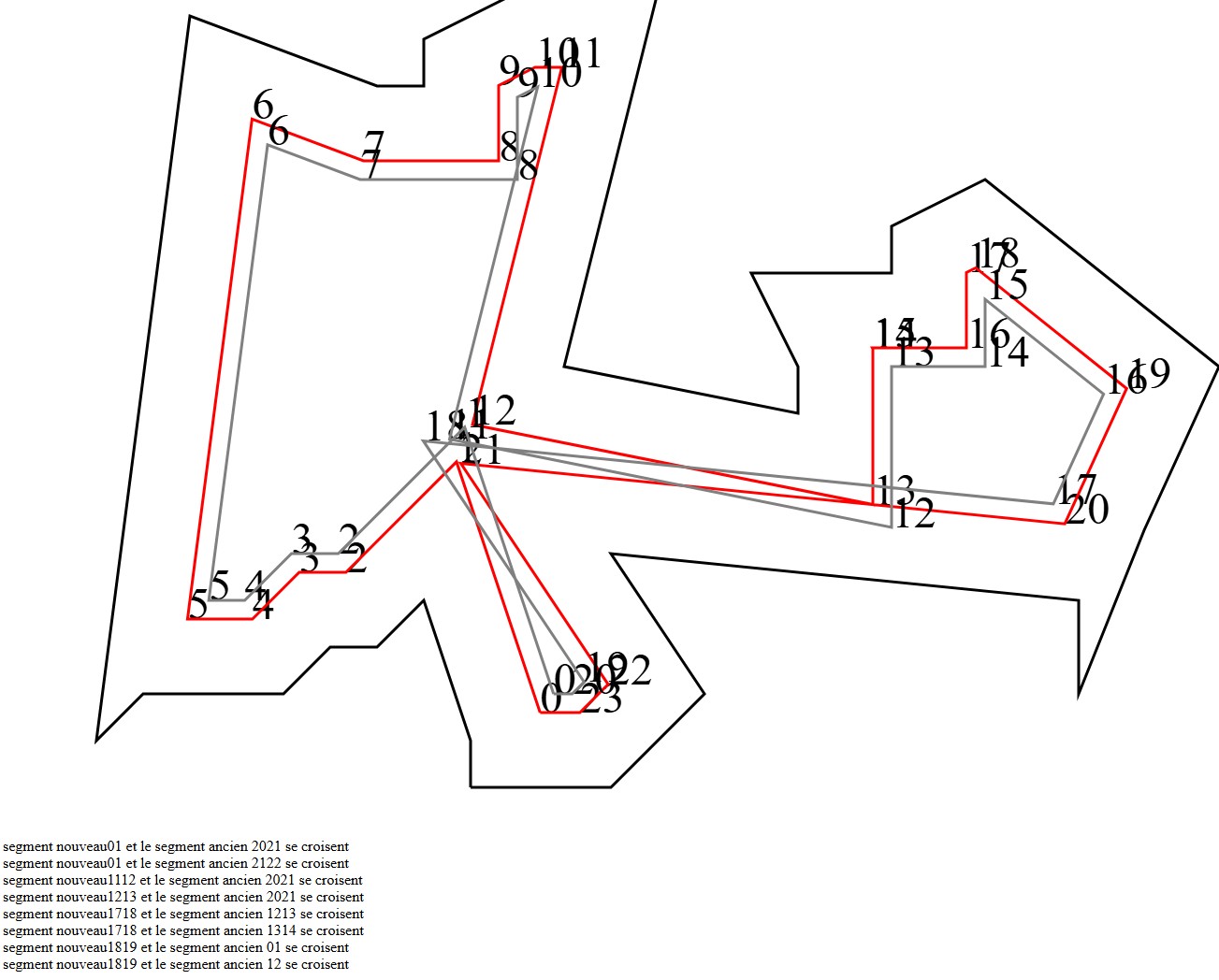
Le terrain est un polygone non convexe (formé par des points GPS) et le robot doit commencer à tondre a la périphérie du terrain et faire plusieurs tours .
Je calcul l'équation des droites passant par chaque segment formé par les points GPS en périphérie. Puis je calcul les parallèles à ces droite d'une distance de n passage par la largeur de la tondeuse .
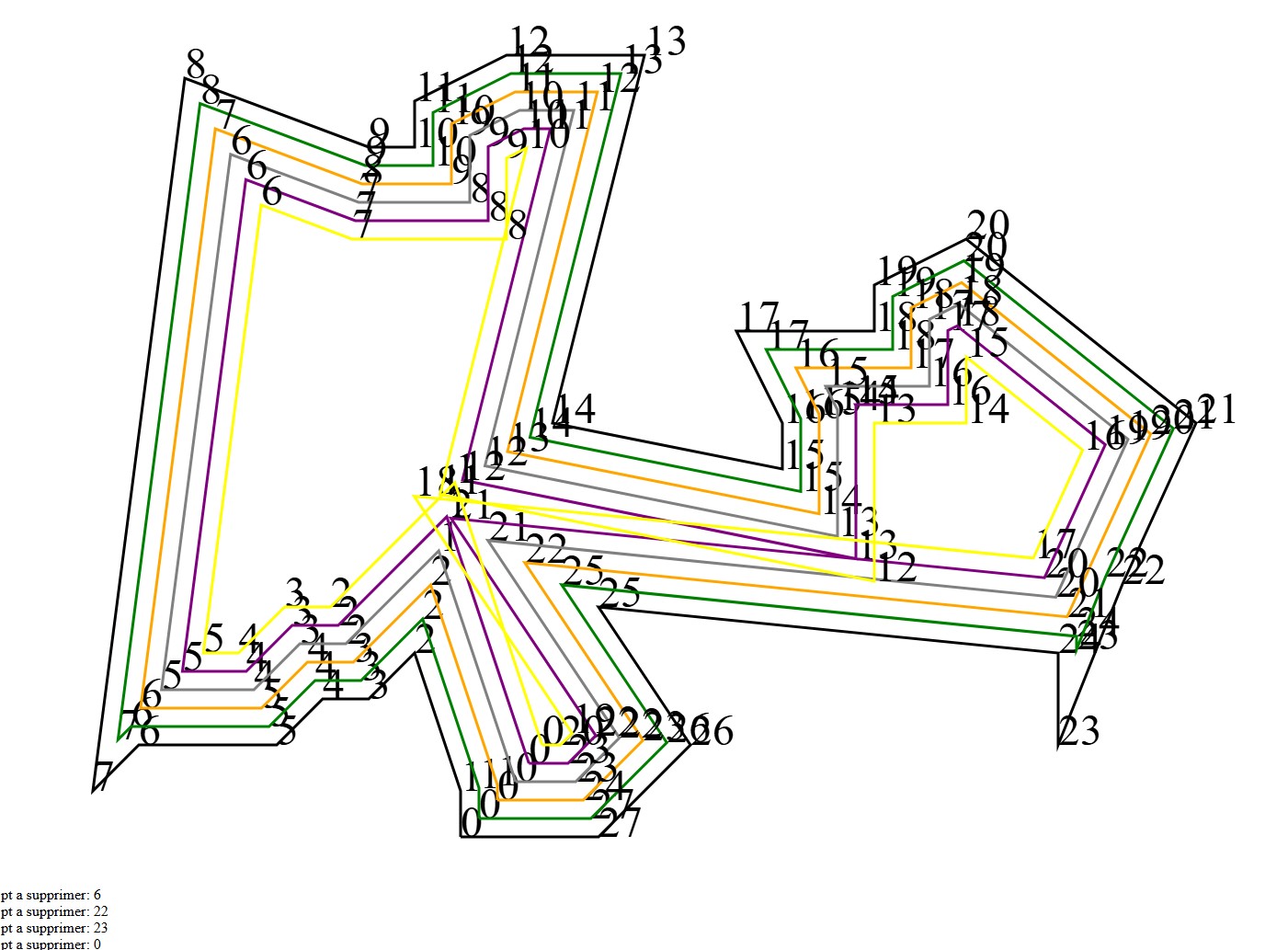
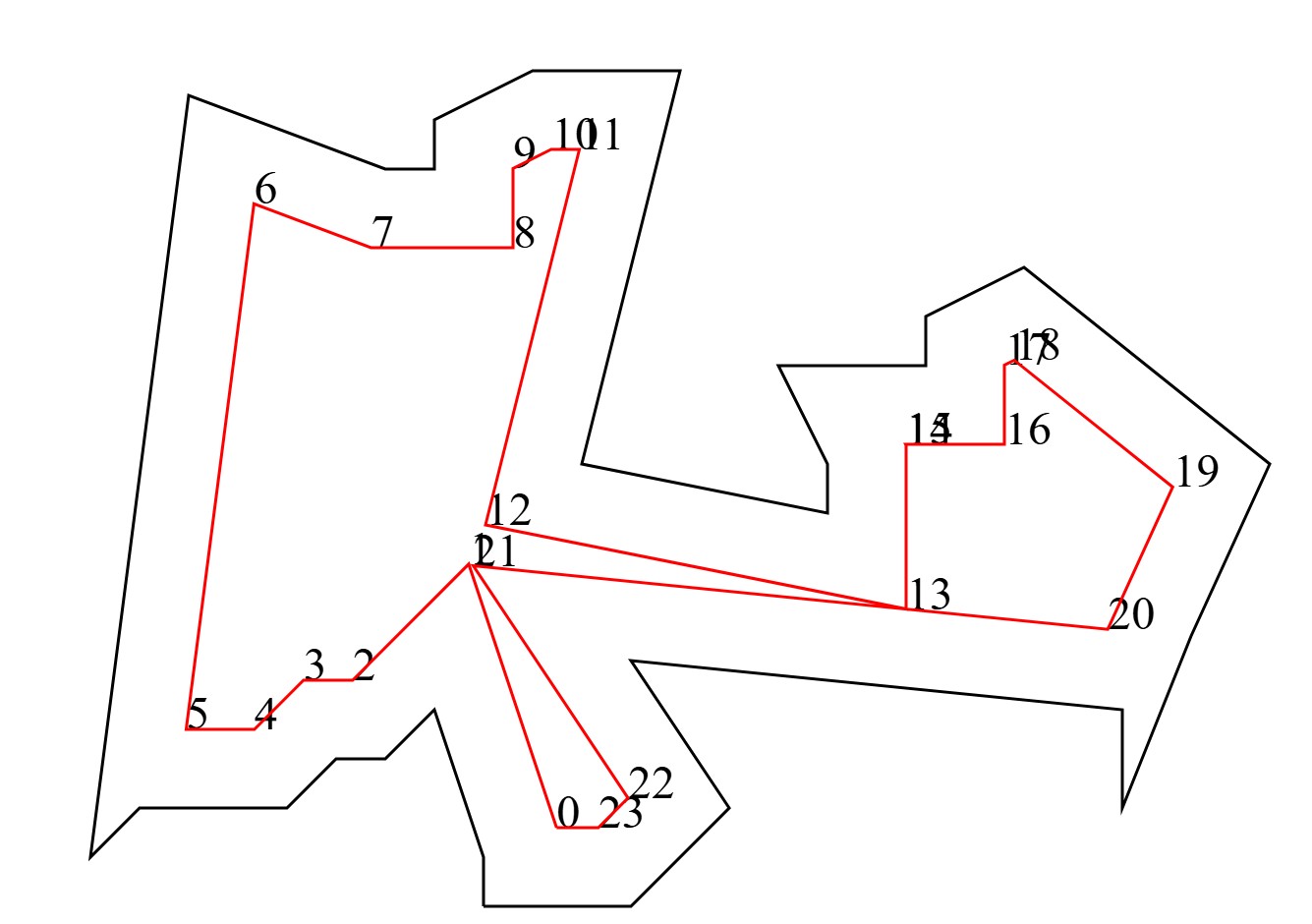
L'intersection de ces droites me donne les nouveaux point de passage du robot.
Le problème que je rencontre est quaprès quelques tours certains points du calcul se retrouvent dans la zone déjà tondue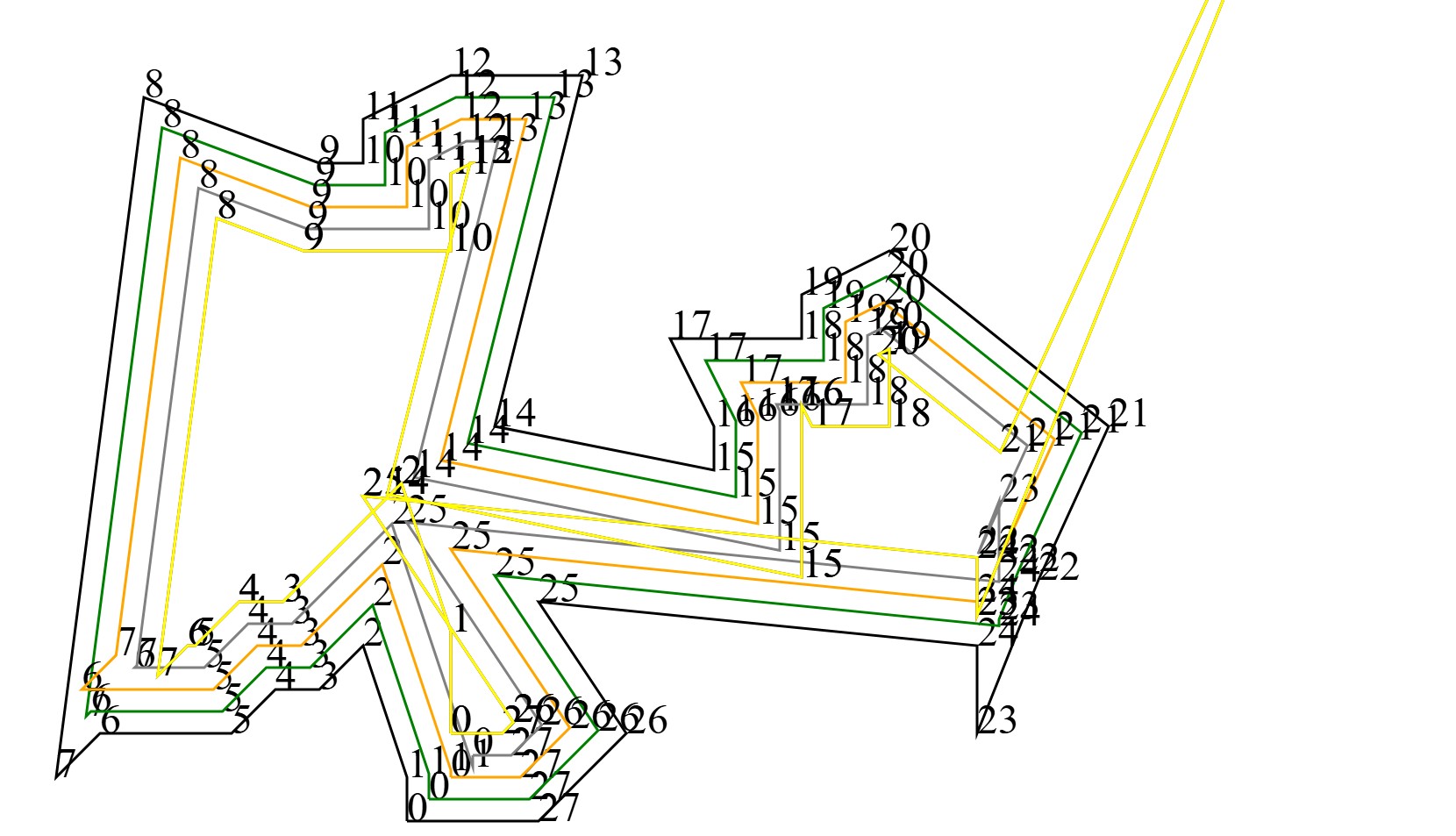
-----
{kind=link}
{kind=link}