


Bonjour à tous
Pour réguler le débit d'eau, j'ai identifié la fonction de transfert sous forme d'un premier ordre:!!
j'ai constaté que l'erreur statique est grande , donc j'ai régulé le système à l'aide d'un correcteur PI (
en ce qui concerne la réservoir, je l'ai modélisé par un simple intégrateur de gain 1:
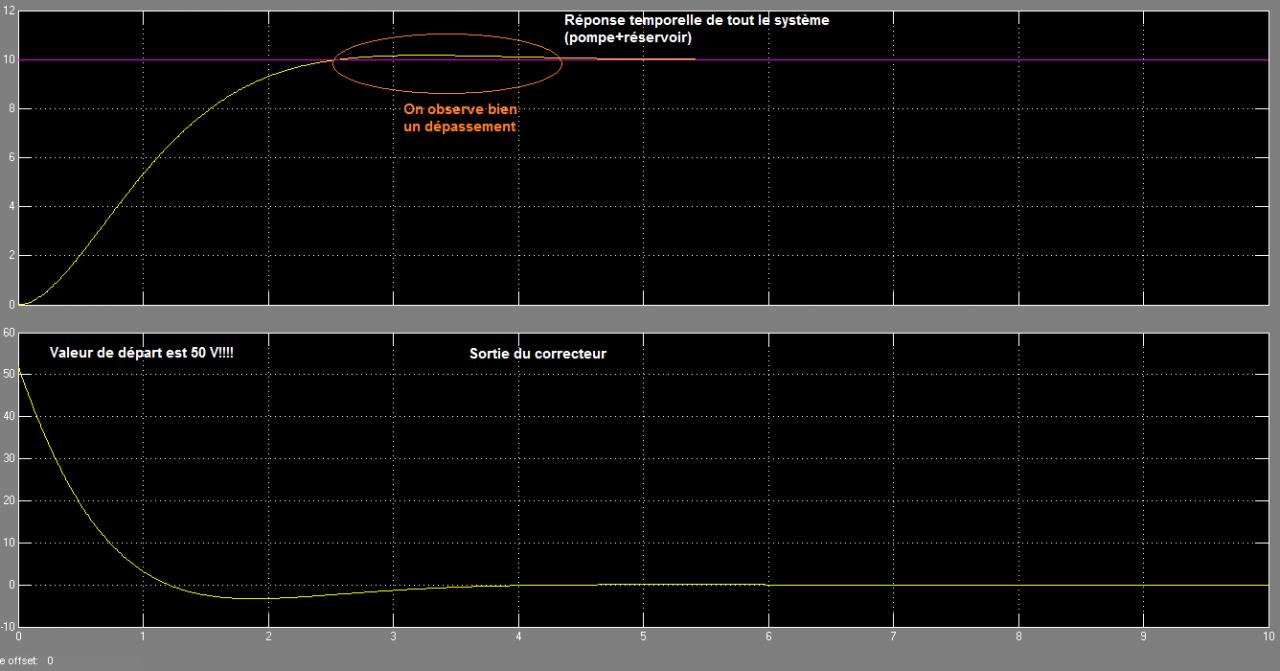
Pour corrigé le système ,pompe et réservoir, j'ai utilisé un proportionnel P, afin de rendre le système stable, car mon but est de corriger le système en minimisant le dépassement et en augmentant la rapidité à l'aide d'un modèle interne!
Voici les problèmes que j'avais rencontré:!!
-Dés que j'applique une consigne négative la pompe commence à pomper dans le sens inverse, et elle ne s'arrêtera plus!!!(je crois c'est l'effet intégrateur)
-le signal de sortie du correcteur PI commence à 50V alors que ma consigne est 10V!! ce qui va détruire la pompe!
ci joint des captures d'écran .
je désire savoir:
-le phénomène physique qui pousse la pompe de tourner sans arrêt même si j'applique une consigne nulle!!
-est ce que j'ai bien modéliser le réservoir ??
-une astuce pour limiter le signal de sortie du correcteur !
merci infiniment d'avance
schéma_bloc.pngrésultat.jpg
{kind=link}
{kind=link}
-----