

Lergomètre en question fonctionne avec une résistance pneumatique, il est visible sur ce site : http://www2.keiser.com/machines/lowe...r300_Leg_Press
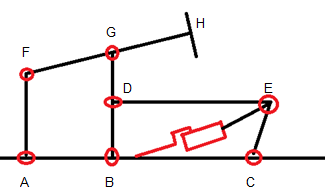
Le schéma de lergomètre est représenté comme ceci : bio2.png
(en rouge sont représentés tous les points de rotations du système)
Les barres FH, GB sont rigides et considérées comme indéformables.
Les points entourés en rouge sont des points de rotations entre les différents leviers.
Lergomètre calcul les données cinématiques de force, vitesse et puissance au niveau du vérin pneumatique (en rouge).
Afin de valider les données de vitesse donnée par lergomètre nous avons placé un goniomètre au niveau de langle DGH, avec lutilisation du théorème dAl Kashi nous avons pu caractériser lensemble des rotations du système et trajectoire des différents points en fonction de langle DGH.
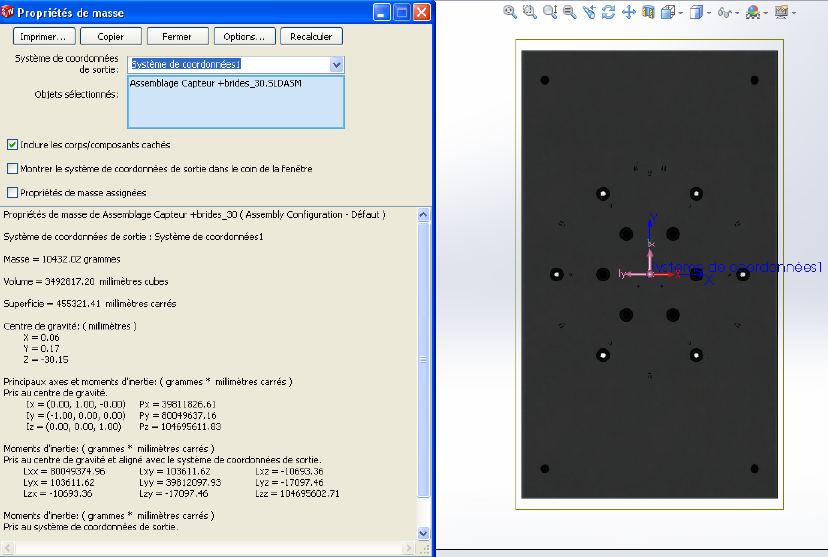
Afin de valider les données de force, nous avons placé un capteur de force au niveau du point H avec les caractéristiques inertielles suivantes :
bio.png
Le problème est que sa masse (10432,02grammes) « rajoute une force dinertie au système » (je ne sais pas si je suis assez précis).
Les données obtenues sur le capteur de force fixée sur la pédale de poussée et les données obtenues au niveau des vérins pneumatiques diffèrent en fonction de laccélération.
Je cherche à savoir quelle méthode utiliser afin de pouvoir faire coïncider mes données du capteur de force avec les données des vérins ?
Je voulais reporter le moment dinertie du point H au point E, je ne sais pas si cest la bonne méthode. Mais je narrive pas à trouver de formule me permettant de caractériser les moments dinerties sur un système complexe de ce type.
Je vous remercie d'avance pour tout conseille permettant de m'aiguiller sur la démarche à suivre.
{kind=link}
{kind=link}
-----