


Bonjour,
Je travaille actuellement dans le cadre de mon TPE, sur l'amarrage spatial et plus précisement sur le cas de l'ATV-5 Georges Lemaître
Dans mon TPE, je fait la présentation du système optique LIRIS (Long infrared imaging sensors) équipant l'ATV, composé de lidars - l'équivalent du sonar mais avec de la lumière dans le visible - et de caméras/capteurs infrarouge
Voici quelques photos :
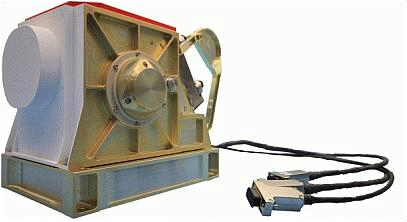
Le type de lidar utilisé est un lidar télémètres laser à balayage (Cf Wikipedia) produit par Jena-Optronik
- Lidar :
ATV5_Auto9.png
- Caméras/capteurs infrarouge :
image3-300x261.jpeg
Je n'ai aucune information sur la Caméra (Je ne sais même pas si c'est une caméra, ou un capteur infrarouge) produite par Sodern
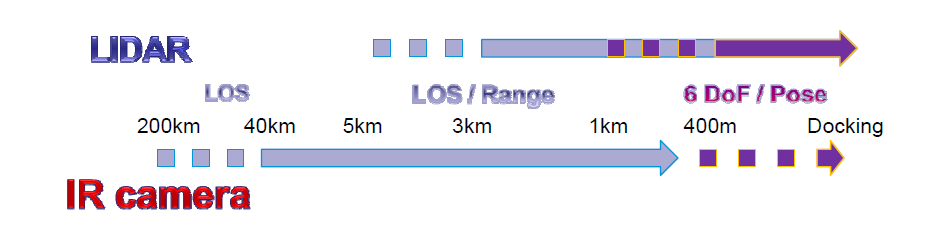
Ce que je sais par contre, c'est que le lidar et les caméras/capteurs sont utilisé de manière différentes durant la phase d'approche comme le montre l'image ci-dessous :
image2.png
*Si quelqu'un sait ce que veut dire "LOS" ou "DoF", je le remercie d'avance*
En gros, celon la distance à laquel se situe l'ATV par rapport à l'ISS (sa cible), il utilise une ou l'autre des deux technologies de capteurs
La question que je me pose, c'est "Pourquoi ?"
Pourquoi est-ce que l'infrarouge est préféré pour la longue distance, tandis que le lidar (Spectre du visible) lui, est utilisé pour des distances courtes ?
Quels sont les particularité des ondes du spectre du visible, et celle des infrarouges ?
Voila ce que dit ce site :
Pour finir, voici une image montrant la différence entre le lidar et l'infrarouge :The demonstration will cover the full range of rendezvous from a far distance of at least 30 km until docking. The infrared and visible camera sensors will operate from far-range to docking and the lidar sensor from short range, about 3.5 km, to docking.
image5.jpg
Merci d'avance à ceux qui me répondront
-----

{kind=link}
{kind=link}
{kind=link}
{kind=link}