

Bonjour,
Je suis en Terminal S Science de l’ingénieur et moi et mon groupe lançons un projet basé sur l’effet gyroscopique. Nous aimerions contrer une force d’un tremblement de la main par la rotation d’un volant d’inertie. J’aimerais déterminer le moment d’inertie sur chaque axe de rotation où le tremblement agit, à partir du couple généré par le tremblement et de la vitesse angulaire du volant d’inertie. Pour l’instant je me limite à mettre un volant d’inertie sur la main. Evidemment avec une identification nous nous sommes aperçu qu'il faudrait stabiliser le coude et l'épaule puis que le tremblement traverse tout le bras.
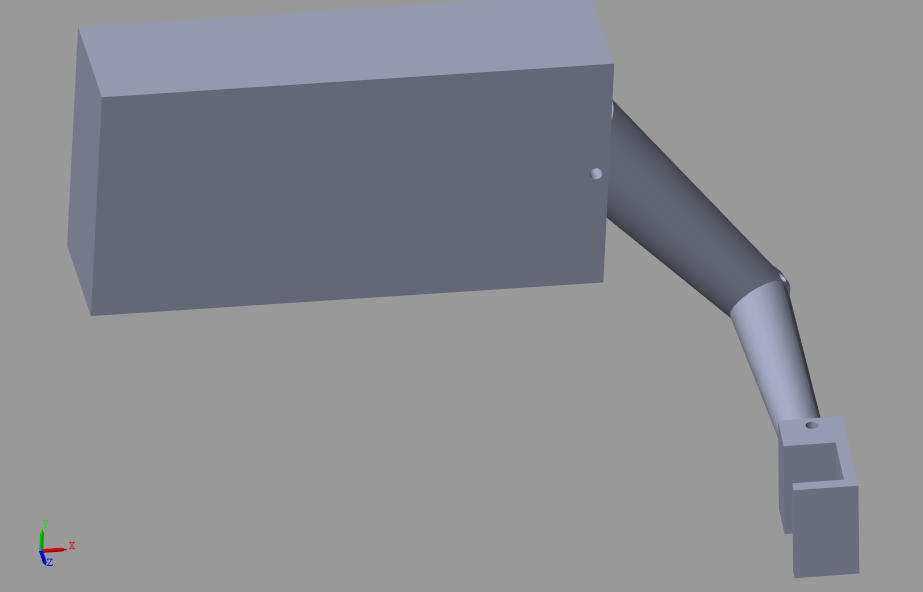
Voici l’image du bras très simplifié:
CaptureBras.PNG
Le système se trouvera sur le dessus de la main soit sur la partie droite de l’image.
A partir du couple et de la vitesse angulaire je dois déterminer le moment d’inertie soit la formule utilisé:
formule gyro.PNG
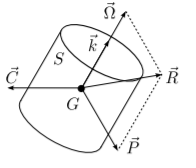
solide gyro.PNG
Où vecteur C le couple, J le moment d’inertie, W la vitesse angulaire axial du volant, vecteur R la vitesse de rotation, k vecteur unitaire de W, vecteur P rotation transverse
Ainsi je ne comprend pas comment faire. Les équations de Lagrange sont-elles utilent ?
Le lien du document d’où je tire l’informations, à partir de la page 24 de la thèse:
http://scd-theses.u-strasbg.fr/2251/...ulien_2011.pdf
Merci d’essayer de m’éclairer
georo51
{kind=link}
{kind=link}
{kind=link}
-----