Bonjour,
J'ai un travail à réaliser dont le but est de faire avancer une voiture automatiquement, dès que la voiture détecte un obstacle elle doit s'arrêter puis reculer.
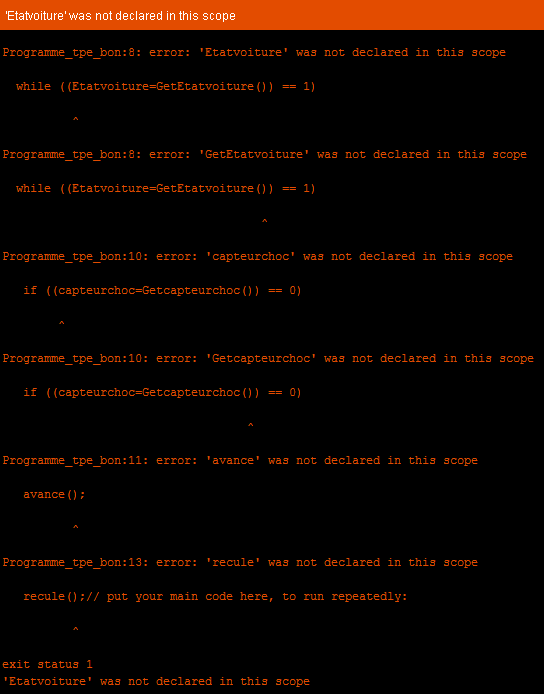
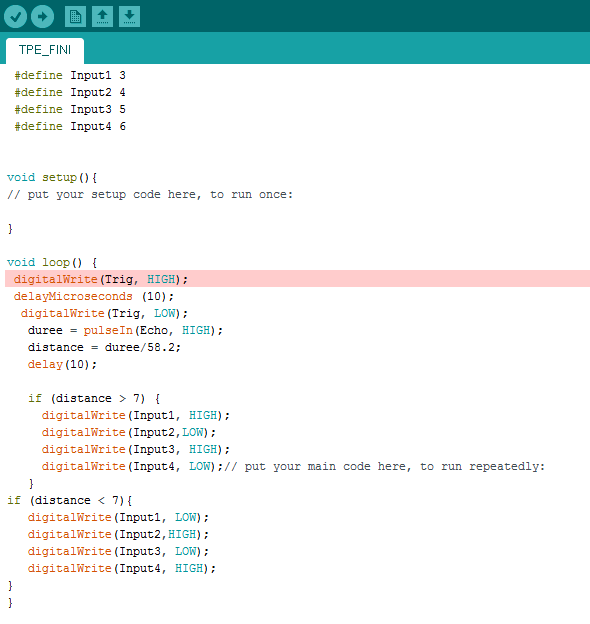
J'ai réussi à faire l'algorithme sur un logiciel simple mais maintenant je n'arrive pas à le traduire en arduino (la langage est le c)
Voilà ce que j'ai mis dans mon algorithme :
Variable Etatvoiture : Entier
Variable capteurchoc : Entier
Début
Saisir Etatvoiture
Saisir capteurchoc
Si Etatvoiture = 1 et capteurchoc = 0
Afficher "avancer"
Sinon
Afficher "reculer"
FinSi
Fin
Je voulais savoir si mon algorithme est bon et comment je pourrais le traduire en arduino.
Merci
-----