Bonjour,
Je vous écris pour vous demander de l'aide concernant le réglage d'un régulateur PID utilisant Arduino. Je suis en train de construire un système de contrôle de température pour un élément chauffant, et j'utilise un relais pour contrôler le niveau de puissance fourni à l'élément. Le relais effectue une commutation toutes les 60 secondes afin de maximiser la durée de vie de l'élément.
Mon programme fonctionne, j'ai réglé la sortie du PID pour avoir une valeur entre 0 et 60 et je commute le relais en fonction de cette valeur.
Je souhaite utiliser la méthode de Ziegler-Nichols pour régler le PID avec plus de théorie, mais je ne parviens pas à faire le lien entre le PID et la commutation des relais. En particulier, je n'arrive pas à trouver quelle est la dimension de la sortie du PID. D'après ce que j'ai lu, le PID ne sort pas une valeur entre 0 et 60 normalement.
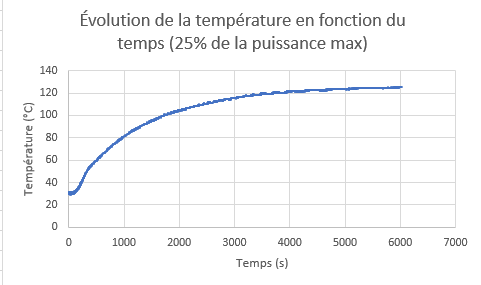
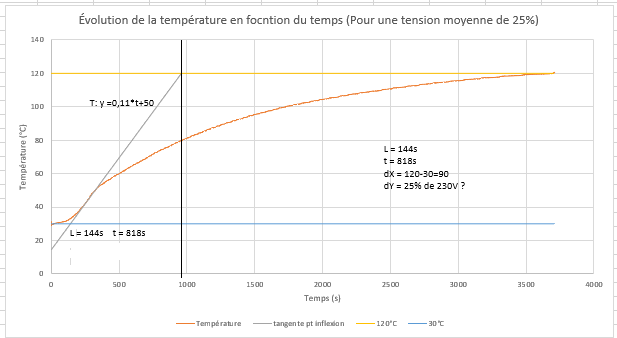
Si j'ai bien compris la méthode en boucle ouverte, il faut faire chauffer l'élément avec un fraction du max et regarder le temps et la température max. Mais cette méthode me donne un coefficient proportionnel de 0,05 alors que d'après mes tests, mon PID fonctionne bien avec 2,5.
Si vous avez du temps disponible pour discuter de ce sujet et m'aider à trouver une solution, je vous serais très reconnaissant. Je peux vous fournir plus d'informations sur le système et sur les réglages actuels du PID si vous le souhaitez.
Merci d'avance pour votre aide.
Cordialement,
-----