

Bonjour,
Je suis en train de réaliser un robot parallèle à 3 degrés de liberté.
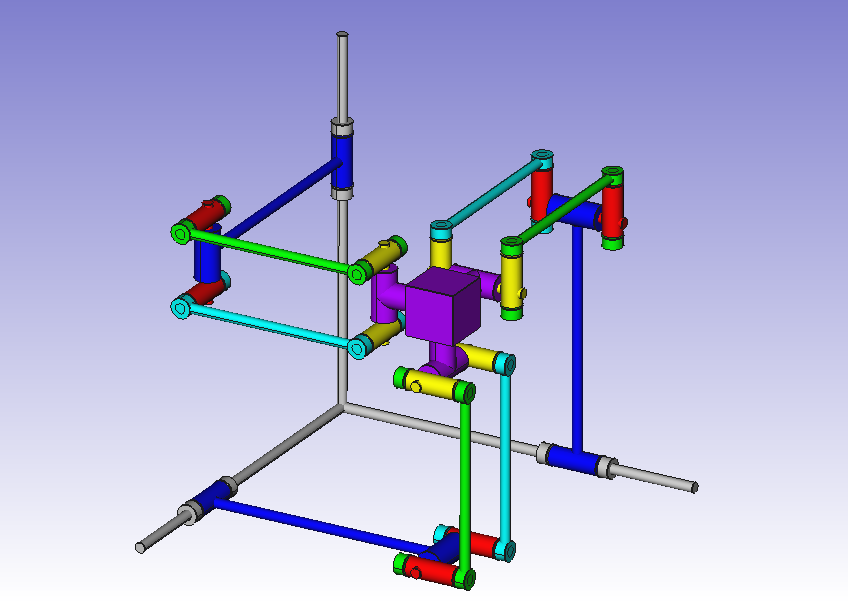
J'ai récemment découvert le delta3 et l'orthoglide, et comme je suis du genre à toujours vouloir essayer, j'ai fais un mix des concepts:
l'orthoglide sans les "glide" (ben oui, une translation, c'est plus compliqué qu'une rotation), je l'ai donc nommé orthorot (c'est pas beau hein...).
Et comme j'aime vraiment la symétrie, au lieu d'avoir un axe chargé (le vertical), j'ai décidé de poser tout ça pointe en bas, les 3 axes travaillant alors de façon similaire (vu de très loin, ça ressemble au delta3, mais les axes ne sont pas les même).
Mais le plus marrant, c'est que j'ai réalisé une maquette (en carton non motorisée) avec des bras (section triangulaire) d'environ 10cm de long, je dispose d'un volume de travail d'environ 8cm de diamètre sur 8 de haut, ce qui est pas mal...
La prochaine étape est de faire le même avec des moteurs avec un volume de travail de l'ordre de 20cm au cube, une précision de l'ordre de 0.2mm, et de piloter tout ça pour réaliser une petite imprimante 3D (genre reprap).
Les lois de commande sont clairement non linéaire, ça va mettre du piment dans la gestion des trajectoires...
Oui, mais comment fait-on ça de nos jours (mes dernières matrices 3D remontent au millénaire dernier)...
Et c'est là que je vous demande de l'aide, car la suite, c'est le pilotage des moteurs, donc mise en équation (argh...) du modèle, si besoin étalonnage (argh encore), utilisation d'un modèle global, ou par voxels ? ? ?
Bref, je crois qu'il va me falloir des cours de rattrapage en robotique, et des pistes vers des logiciels (libres bien sûr...) pour mener à bien le projet.
C'est pas tout à fait "la robotique pour les nuls" qu'il me faut, mais presque (surtout coté dynamique, asservissement (mais pourquoi j'ai séché les cours...)).
Petite précision, je vais probablement prendre une carte à base d'un micro confortable (genre stm32f103), mais pour cet aspect, je vais poster du coté électronique...
-----

 ...
...
{kind=link}
{kind=link}
{kind=link}
{kind=link}