

Bonjour,
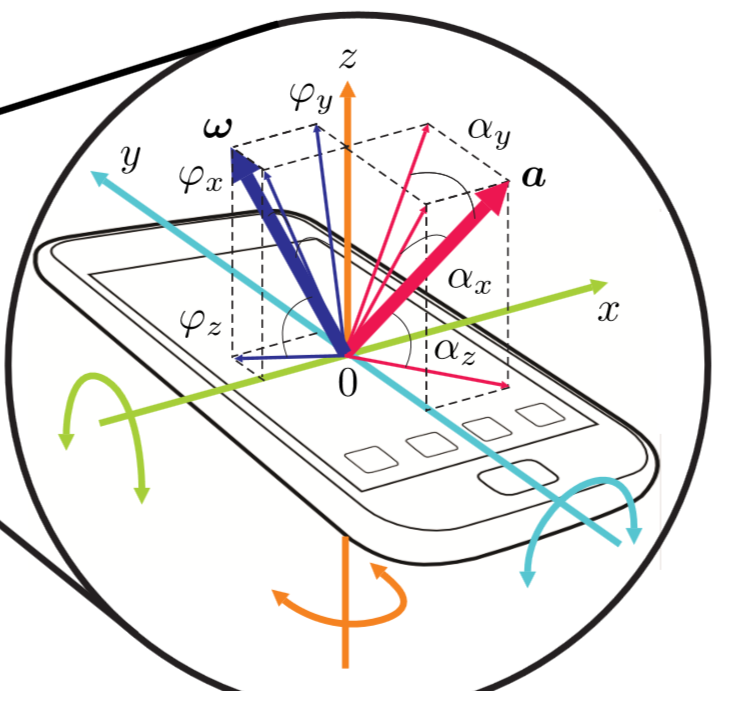
Je ne sais pas si quelqu'un pourrait comprendre ce schéma, le seul détail que j'ai est le vecteur "a" (en rose) représente le vecteur de l'accéléromètre du téléphone et le vecteur bleu (oméga) représente le vecteur du gyroscope ; pour le reste des vecteurs (alpha et phi) ils représentent les angles d'orientation de a et oméga.
Ma question : comment calculer les angles d'orientation (alpha(x), alpha(y), alpha(z)) et (phi(x), phi(y), phi(z)). Supposons qu'on a les coordonnées (x, y, z) de a et oméga.
-----

