

Bonjour à tous,
Je me suis lancé dans un petit projet perso qui se présente ainsi :
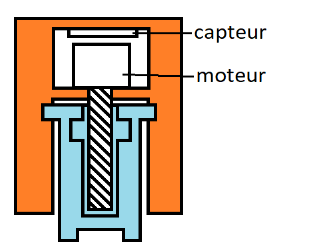
Simplement, une vis sans fin activée par un moteur qui permet de monter/descendre la partie bleue du système. Le moteur n'est pas fixé au bâti (orange), et dans le cas où une force est appliquée sous la partie bleue, il vient faire contact avec le capteur de force situé juste au-dessus. Le but final est de faire un système asservi en force, mais nous n'en sommes pas là.
Pour l'instant, j'essaye de déterminer une façon de dimensionner mon moteur afin de pouvoir baisser ma partie bleue même dans un pire cas, qui correspond à la situation où une force de 5N serait appliquée sous celle-ci. Une rapide recherche google ne m'a rien appris, j'ai donc décidé de me lancer dans des p'tits calculs. Mon raisonnement est le suivant :
La puissance mécanique fournie par le moteur correspond à son couple C (N.m) fois sa vitesse de rotation w (rad/s). Il faut qu'elle soit au moins égale à la puissance pour vaincre la force F (N) sous la partie bleue, qui est de F*v (où v est la vitesse de la partie bleue, en m/s). Donc à ce stade : Cw = Fv
Dans le même temps, la position angulaire de la tige filetée et la position de la partie bleue ne sont pas indépendantes puisque reliées par un système vis-écrou. On a, selon mes calculs, v = w*p/(2000*pi), avec p le pas de vis (en mm/tour).
On injecte cette expression dans la précédente, on simplifie par w, et on se retrouve avec ma formule finale : C = F*p/(2000*pi).
Le problème, c'est que les valeurs de couples obtenues ainsi paraissent extrêmement faibles : pour une force F de 5N et un pas de vis p de 0.8mm/tour, je trouve un couple C de 0.0006 N.m. Je sais que c'est un minimum, que j'ai négligé les frottements, considéré la liaison vis-écrou parfaite et pas ajouté de coefficient de sécurité, mais ça paraît tout de même extrêmement bas. Et le vrai problème, c'est que je ne vois pas où ma logique a péché. Quelqu'un a une idée ?
Merci à tous
-----