

Bonjour
Le schéma ci-joint résume la commande d'un moteur DC 36V 800W alimenté par batterie et qui entraîne par courroie deux roues arrières.
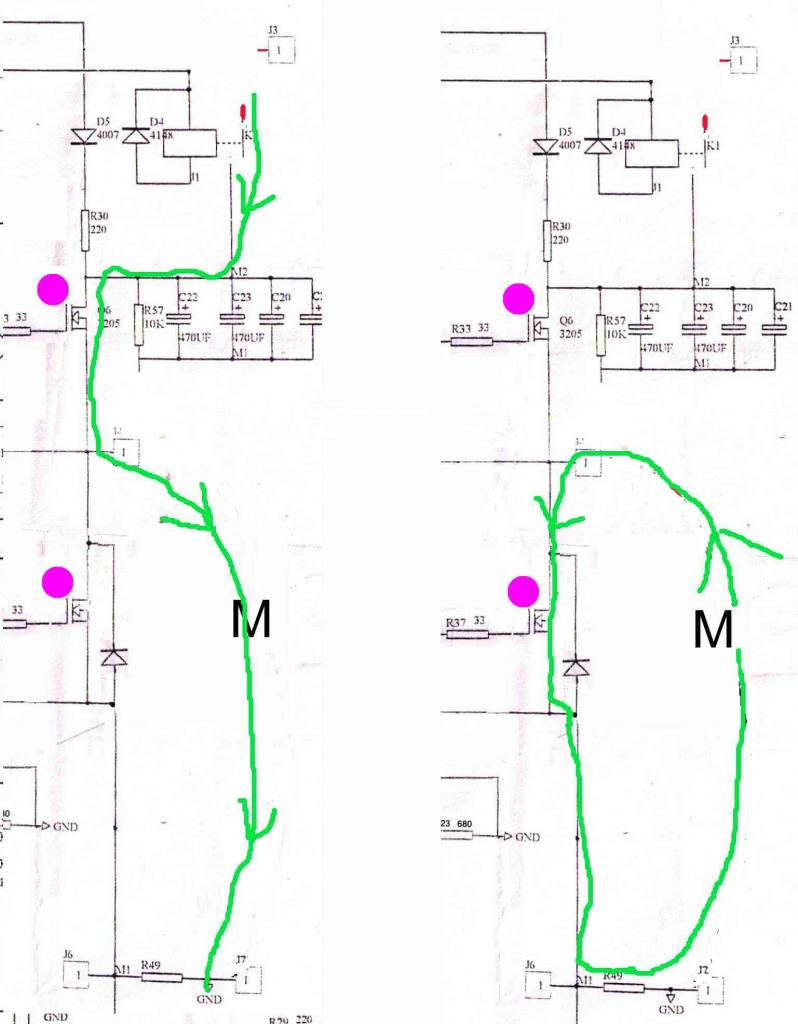
En fonctionnement normal, la moitié gauche du schéma, a half-bridge contrôleur IR2103 met passant un hexfet 3205 (point rose en haut) et un courant fourni par la batterie traverse le moteur. (En fait les points roses correspondent à trois hexfets en parallèles, j'ai simplifié pour faciliter la compréhension)
En fonctionnement exceptionel, la moitié droite de l'image, le contrôleur bloquer le hexfet haut, et ouvre le hexfet bas pour mettre le moteur en court-circuit sur lui-même. Le moteur, toujours en rotation, produit un EMF et un fort courant circule dans le court-circuit. Ceci freine le moteur, c'est voulu.
Nous pensons simplement remplacer le moteur 36V/800W par deux moteurs 36V/350W en parallèle entraînant chacun sa roue arrière. Or le fabricant en série de cet engin n'aime pas l'idée, il parle de déphasage, mais je ne vois pas le problème. On peut imagine une roue freinée par la boue, ou une roue décollée du sol par une bosse et tournant à grande vitesse, mais je ne vois toujours pas le problème.
Vous m'avez déjà aidé sur ce sujet, http://forums.futura-sciences.com/el...ation-20a.html j'aimerais soliciter de nouveau vos avis.
Merci
-----