


Bonjour,
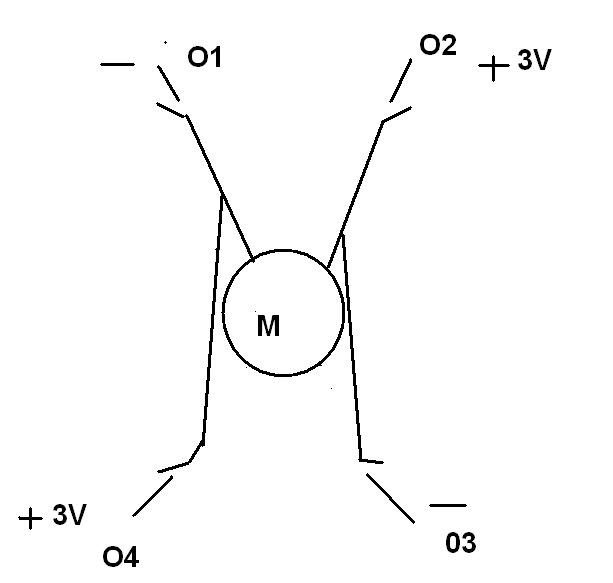
je suis en Terminale S SI, et dans le cadre de mon PID (projet inter-disciplinaire), anciennement PPE (rien n'a changé, à part le nom), je réalise la maquette d'une plate-forme pour personnes handicapées. Quoi qu'il en soit j'ai donc besoin, pour assurer la montée et la descente de cette plate-forme, de commander un moteur dans les deux sens.
J'ai déjà effectuer quelques recherches en plus des cours d'élec qu'on m'enseigne, et il semble s'avérer que la solution d'un pont en H est une bonne solution.
Le hic, c'est que mon programme est réalisé en GRAFCET, dans le but de commander la maquette via un automate (API). Je n'ai donc pas de microcontrôleur PIC à ma disposition.
De ce problème découle deux questions :
- La première : La solution d'un pont en H est-elle réalisable au vue des contraintes de mon projet ?
- La seconde : Y a t-il une autre solution (plus simple, évidemment) ?
En cas de réponse(s) positive(s), comment dois-je procéder ?
PS : J'ai cru comprendre que je pouvais utiliser les relais de l'automate, mais bon, c'est pas très clair pour moi...
Merci d'avance pour vos réponses.
Inzeboxmusic
-----

 J'y connais rien en automate ....
J'y connais rien en automate ....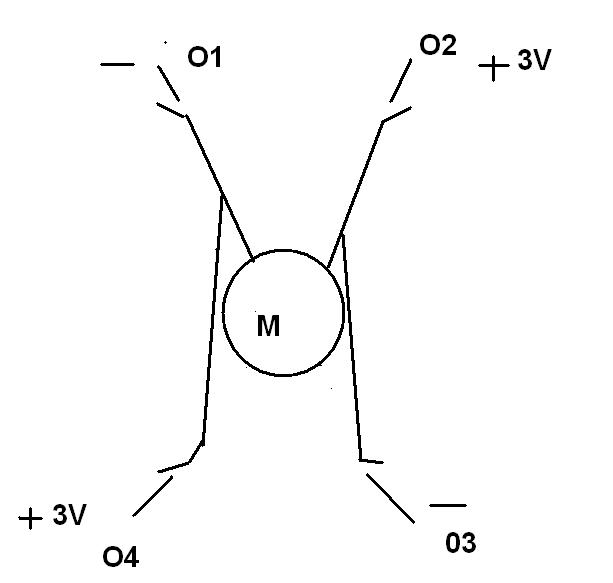{kind=link}