

Bonsoir à tous,
j'ai pour projet la fabrication d'une voiture RC .
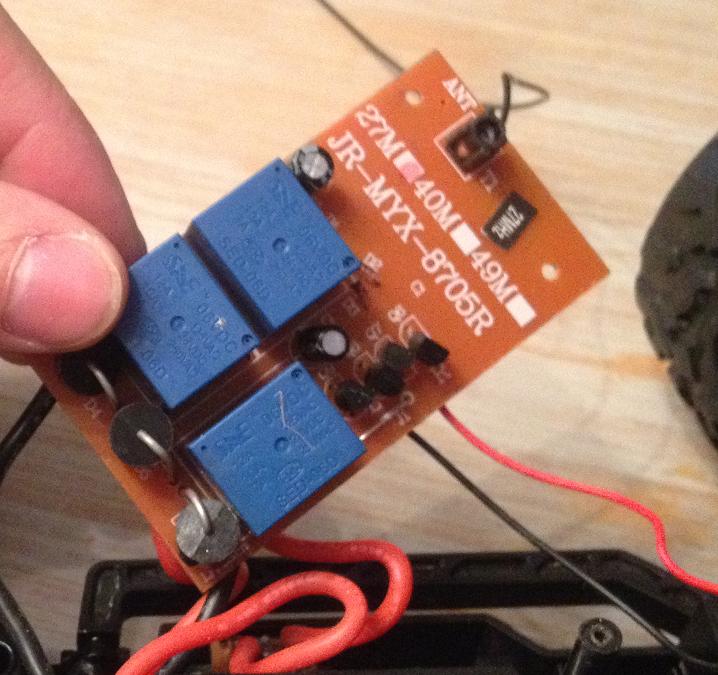
J'ai donc récupéré une carcasse comme base de départ . Je pensais que la direction était géré par un servomoteur , et ben non .
La direction est gérée par un petit moteur CC de ~6V , il consomme 20mA en tournant à vide , et cela augmente quand je le freine(avec la main) . jusque la tout est normal ;
Si possible je souhaite gardé ce moteur cela m'éviteras d'acheter un servo moteur .
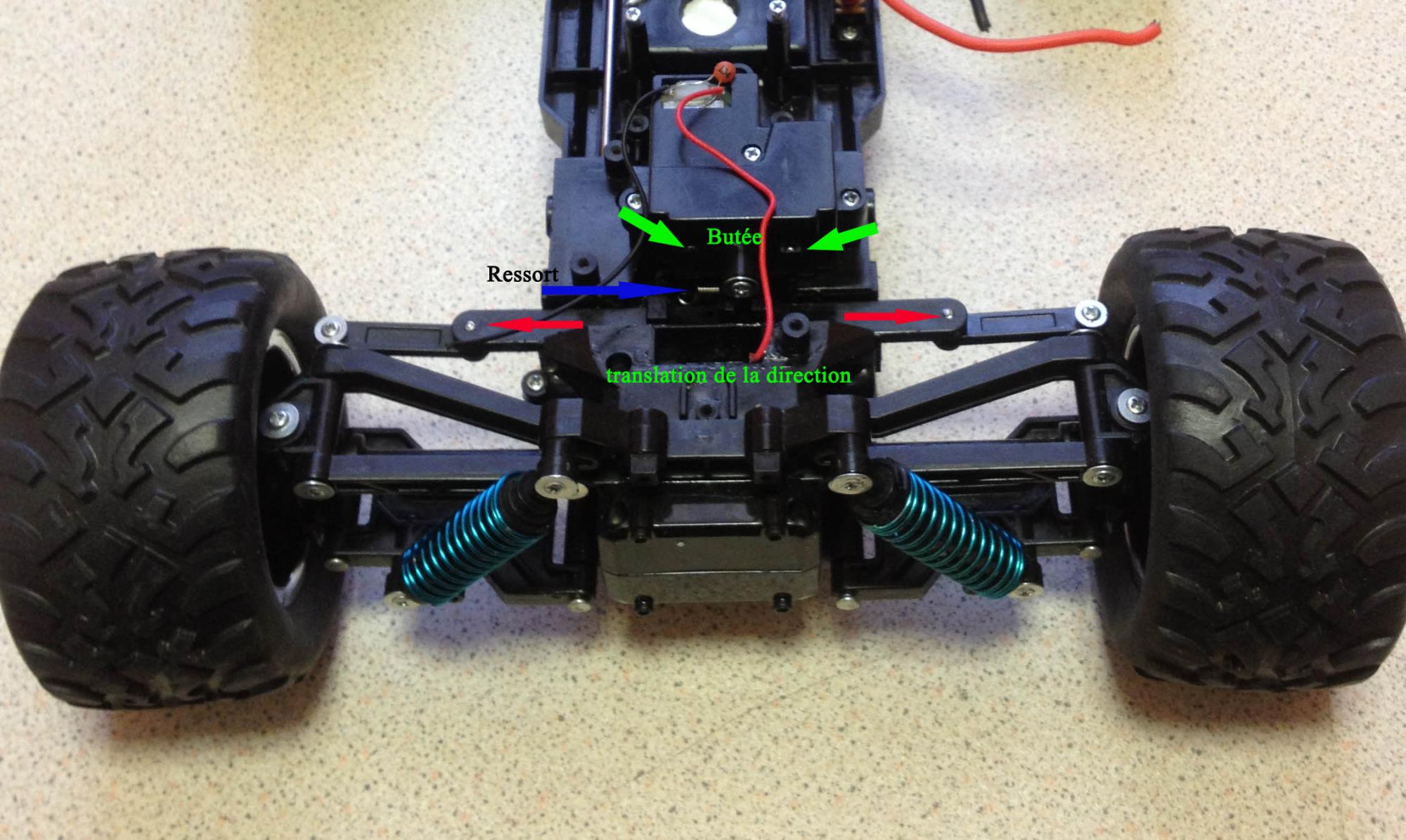
Je précise que pour faire revenir les roues dans l'axe il y as des ressorts pour le ramener au centre quand plus de courant .
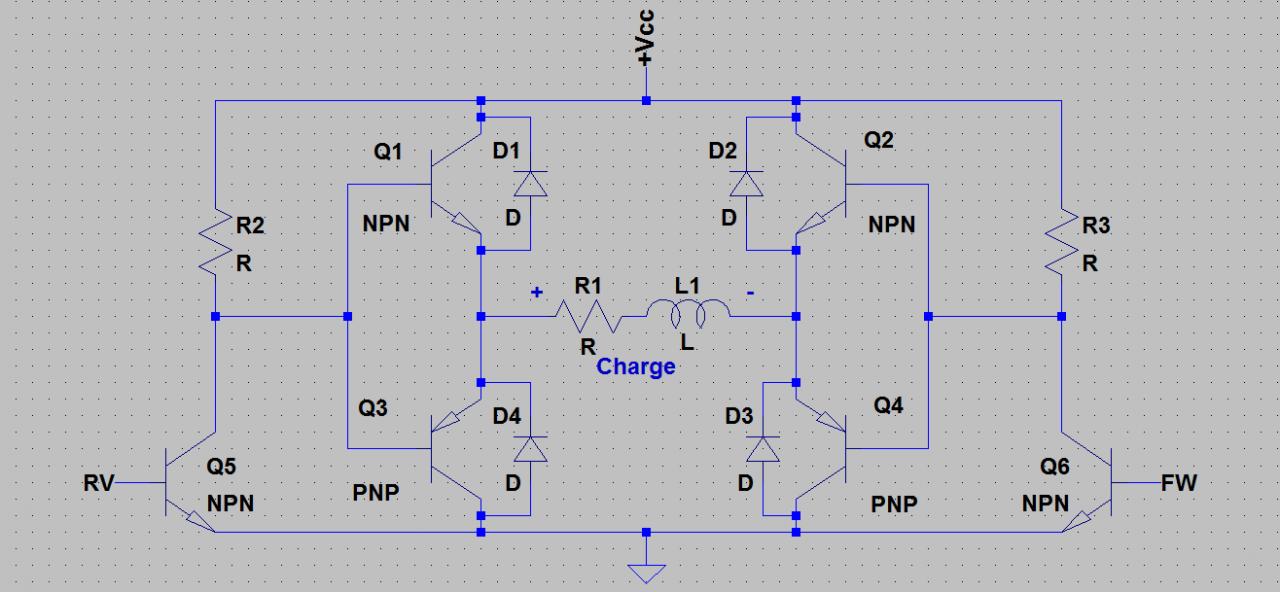
Je souhaite pour ma part le gérer par µC, transistor pour la puissance et relais pour le sens !
Ma question comment le moteur était gérer lorsque qu'il arrivait en butée ? quelle serait mes solutions ?
direction.jpg
-----




 pour les cauchemars nocturnes de ta prochaine nuit !
pour les cauchemars nocturnes de ta prochaine nuit !






{kind=link}
{kind=link}
{kind=link}