Bonjour à tous,
J'ai un petit problème avec des couples. En effet, j'essaie de créer un petit robot pouvant ce redresser pour cela j'ai besoin de connaitre les couples à fournir pour redresser le robot.
Voici mon problème: je cherche un couple pour redresser mon robot(voir image ci contre)
Or Il peut avoir des positions entre de 0 à 15degrés (angle D1Gs)
Je pense donc qu' à 0degré il faudra un couple de 0N.m car en equilibre mais à 15° ?
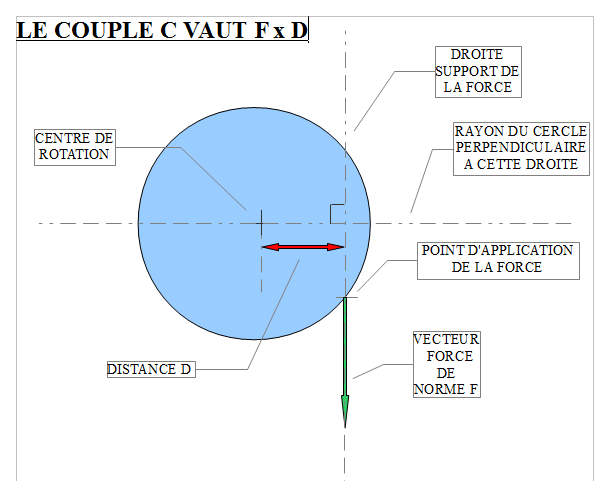
Or je sais que pour calculer un couple, c'est une distance *le poids
Cependant je ne sais pas quelle distance prendre
Merci de me dire laquelle c'est.
Cordialement,
Merci de bien vouloir m'aider
-----





 )
)