

Bonjour
J'aurai besoin de votre aide
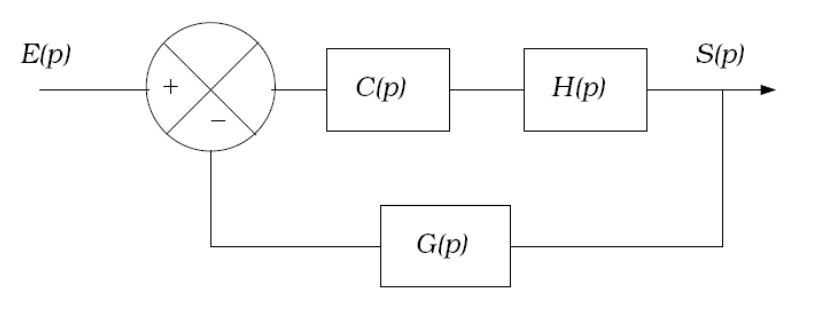
Je dois, dans le cadre d'un TP, réaliser un système dasservissement de ce type (sur ordinateur):
futua.png
Avec comme condition:
Un ordre 4 et classe 1 pour le Fonction de transfert ,un gain de chaine directe de 19.8, un gain de chaine de retour de 4.8 et un correcteur Proportionnel dérivée (de type K(1+T*p))
Je dois, grâce à ces condition, réaliser le système sur scilab, avec un H(p)=19.8 /F(t) avec F(t)=p*(1+p/w1)(1+2*Xi*p/w2+p²/w2²) (Ordre 4 classe1)
et il faut d'abord trouver w1, w2, Xi qui permettent d'avoir un sortie équivalente à l'entrée.
Au début j'étais parti sur un système de ce type: W1=100, W2=1000, Xi=15
Sans correcteur, je trouve ceci au niveau de la sortie
futura1.png
En me disant, cool, j'ai juste à augmenter la précision, (ce qui est possible avec mon correcteur PD)
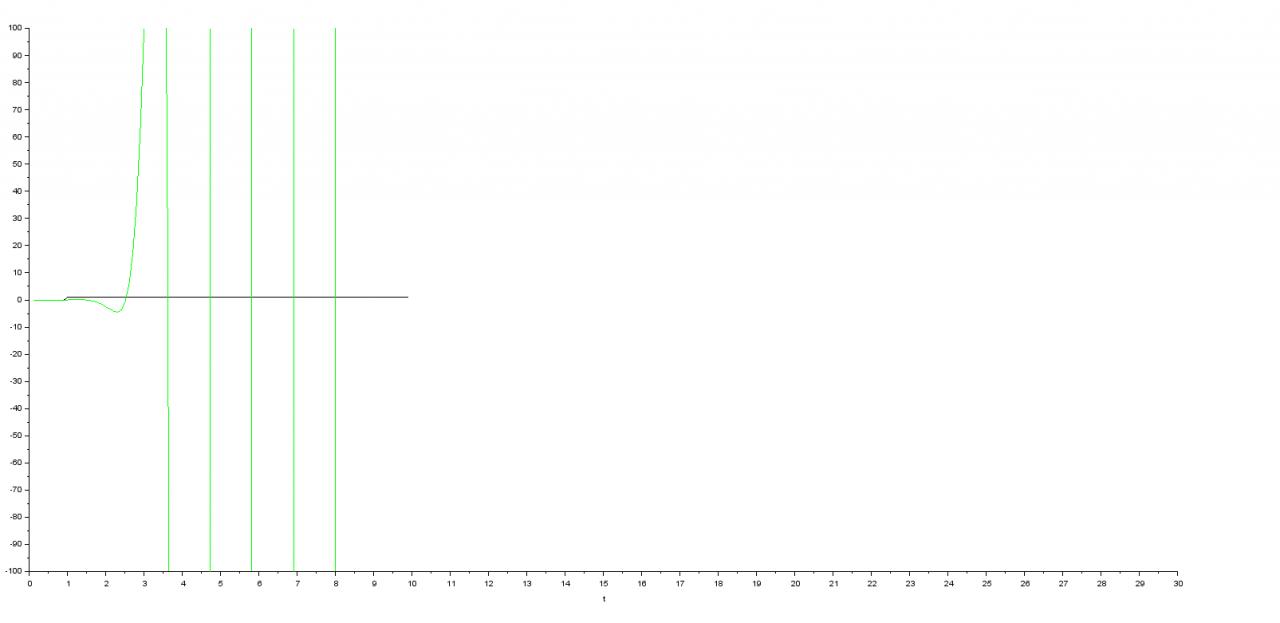
En rajoutant un Correcteur simplement proportionnel (avant d'utiliser le PD), normalement ça augmente la précision, sauf que quand je mets un correcteur K avec K=2 je trouve un système complétement instable!
futura 3.jpg
Normalement le PD doit augmenter la stabilité, mais je pense que c'est quasiment impossible de rendre le système totalement stable.
J'ai éssayé avec d'autre valeurs de w1,w2, Xi, mais je tombe souvent sur le même problème.
Si quelqu'un peut m'aider ça serait vraiment bien!!
Merci
-----





{kind=link}
{kind=link}
{kind=link}