

Bonsoir,
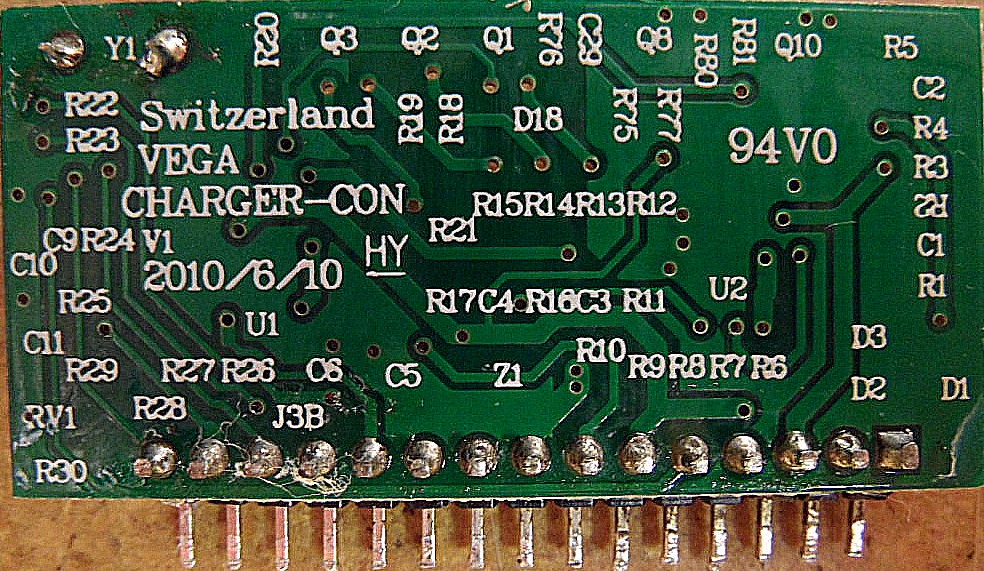
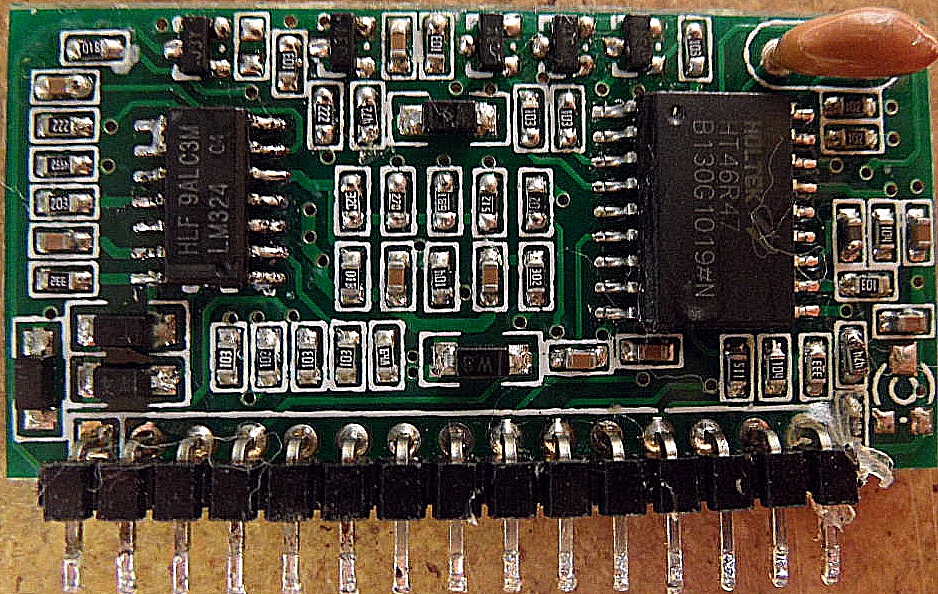
Mon chargeur de batteries de voiture est tombé en panne. Il se compose d'une alimentation à découpage et d'une platine à microcontrôleur permettant d'optimiser le processus de charge.
Après quelques mesures, je constate que l'alimentation fonctionne bien, mais que la platine à microcontrôleur ne contrôle plus l'alimentation!
Je voudrais donc essayer de remplacer la platine à microcontrôleur par un Arduino.
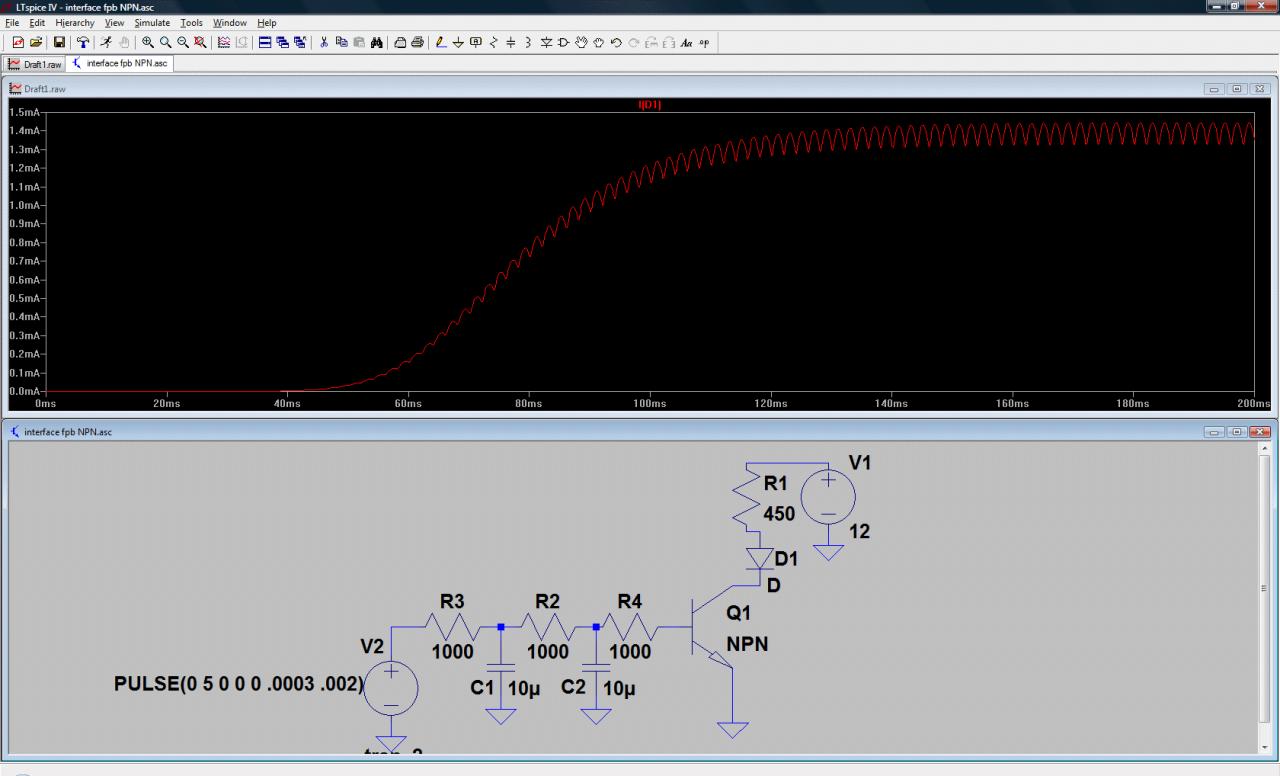
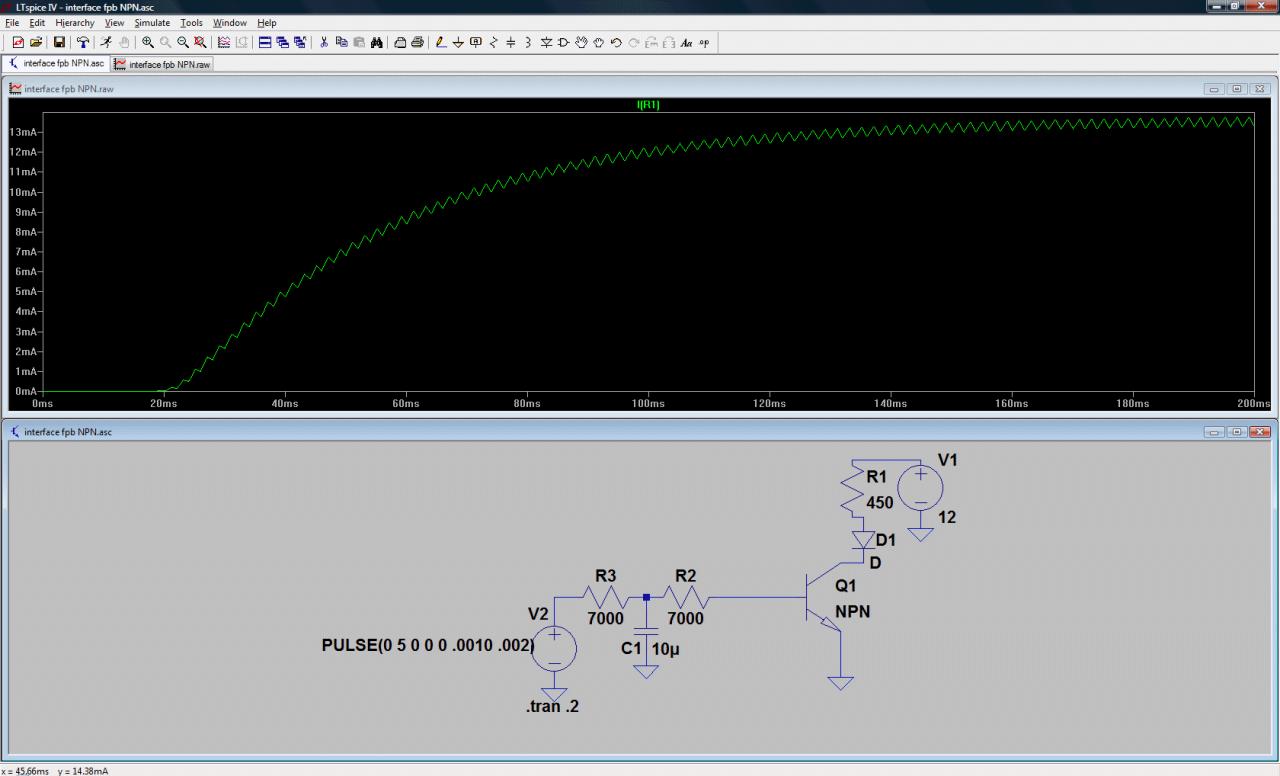
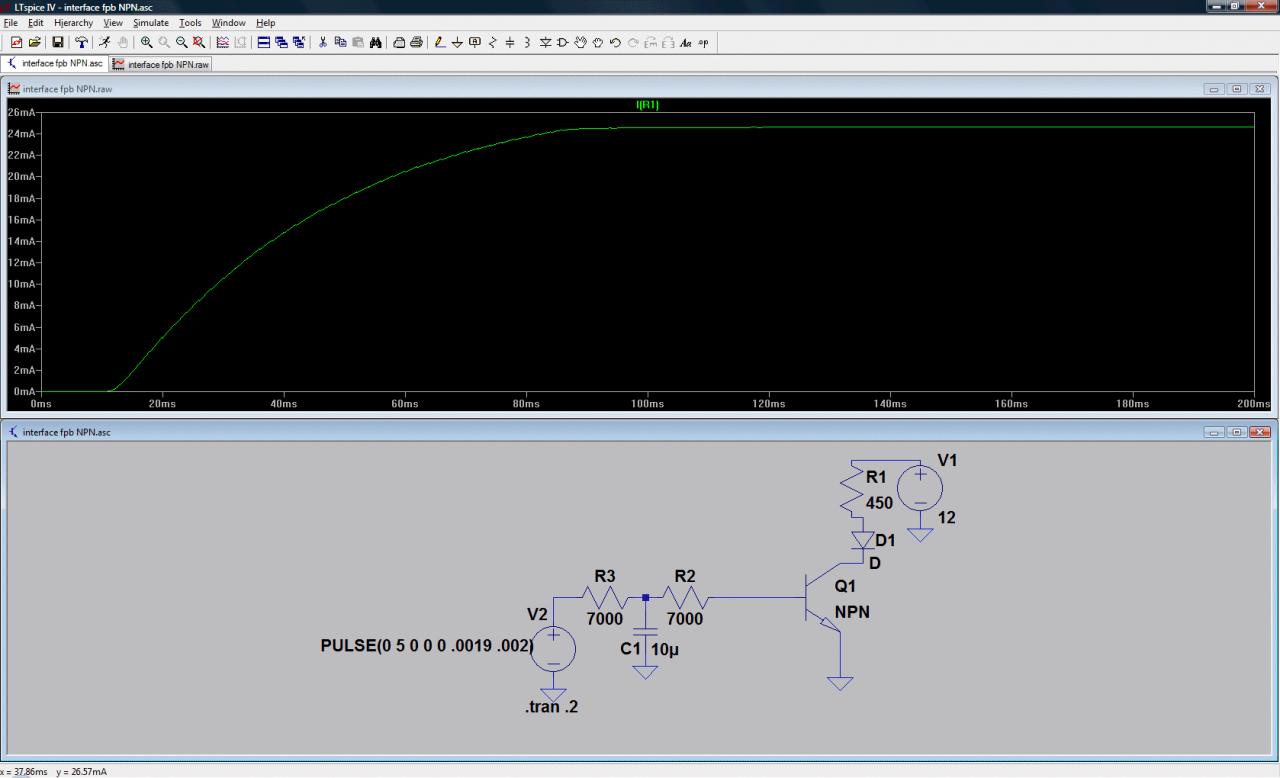
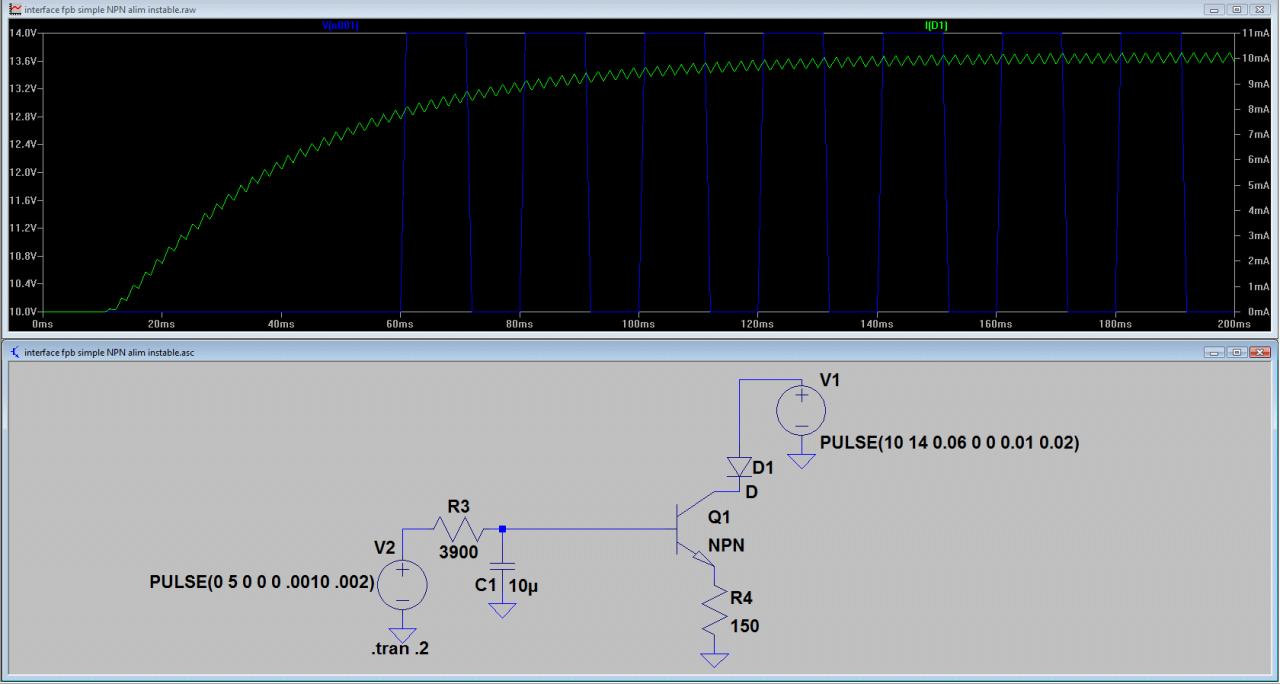
Dans le montage original, la tension fournie par l'alimentation à découpage est contrôlée en agissant sur la diode de l'optocoupleur. Cette dernière est alimentée par la tension secondaire de l'alim à découpage et la platine à microcontrôleur module le courant traversant la diode. Le montage est celui-ci:
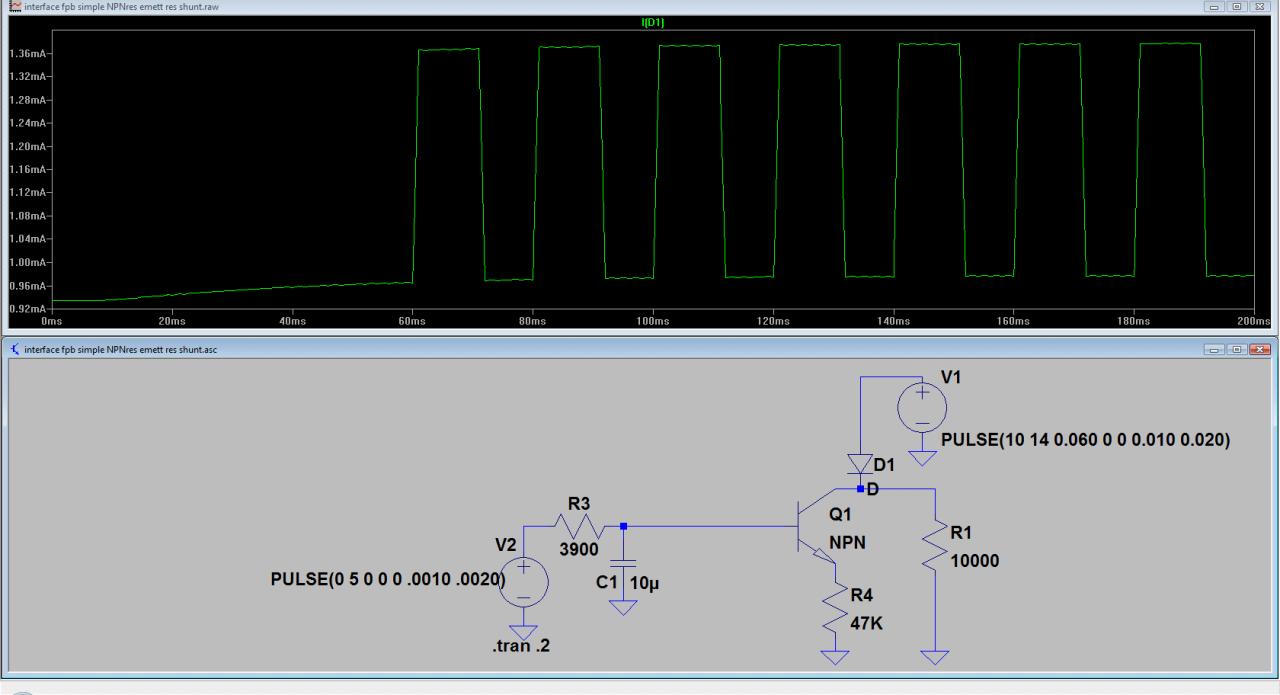
V1 représente la tension de sortie de l'alim (environ 12 V)
D1 représente la LED de l'optocoupleur
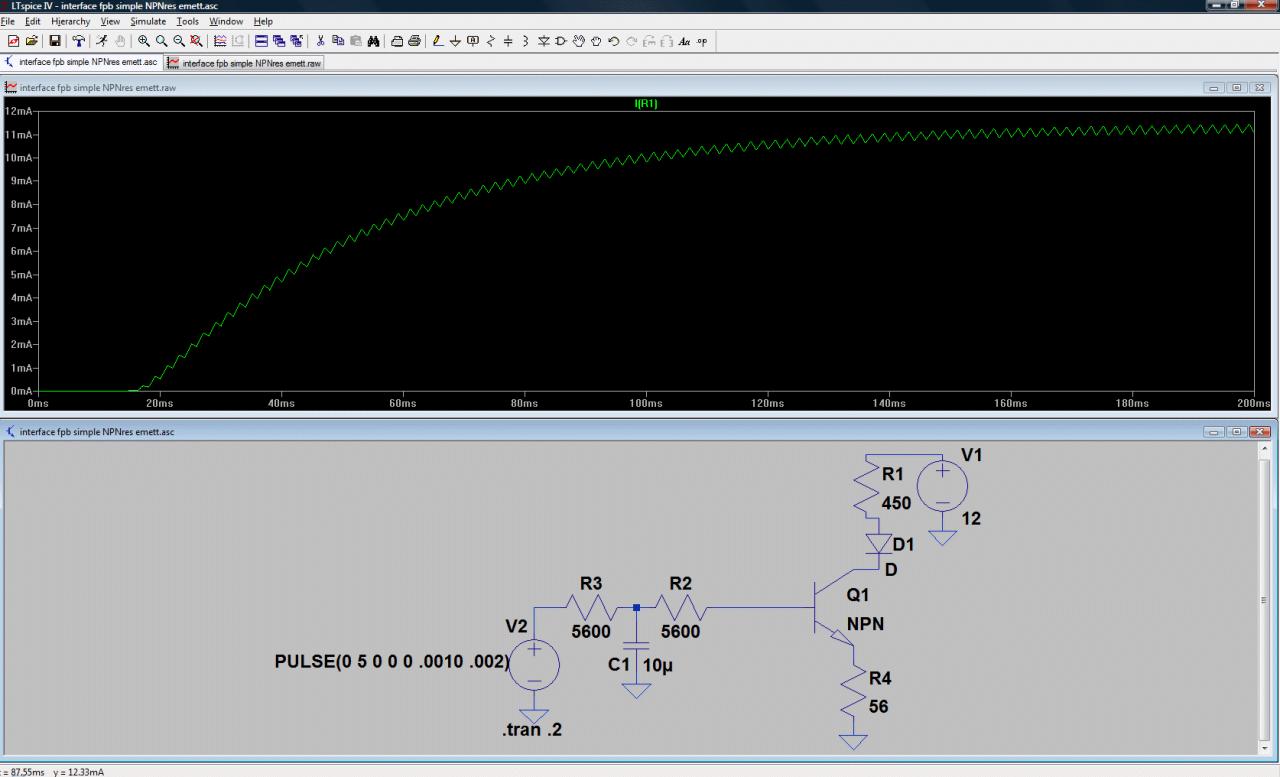
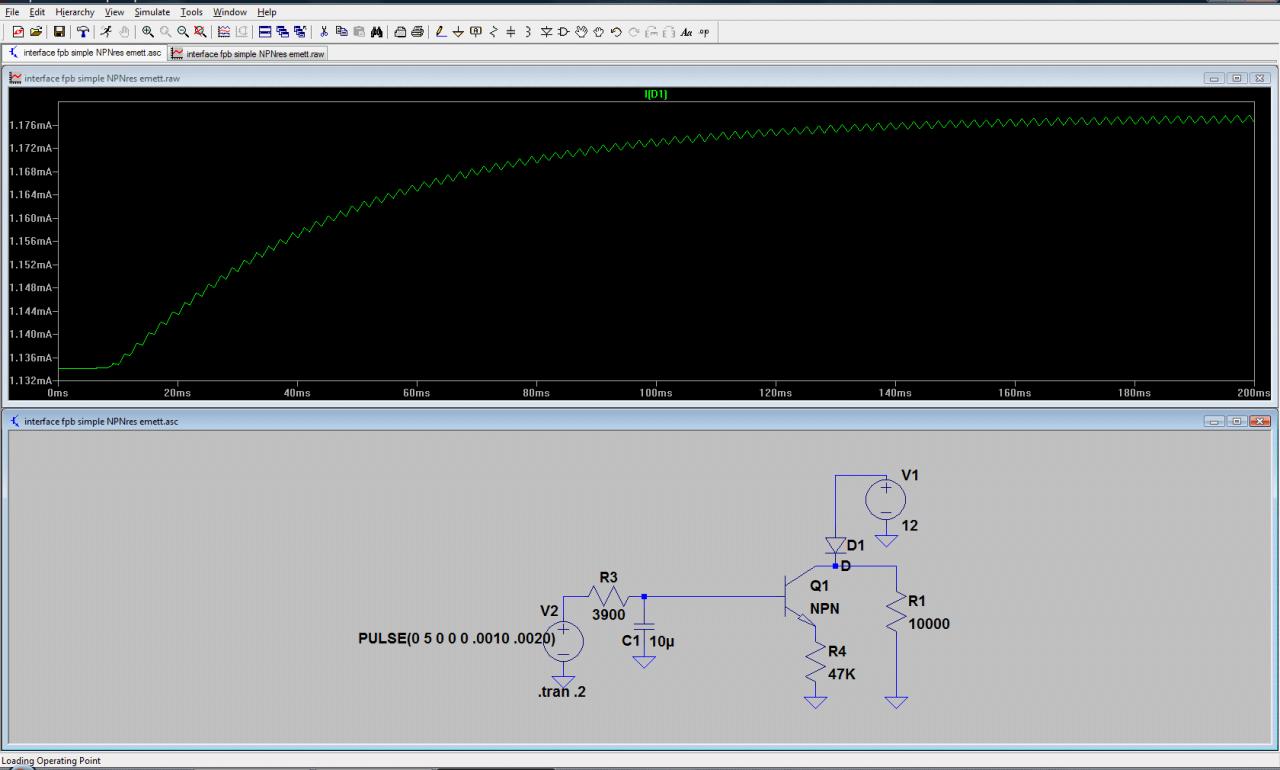
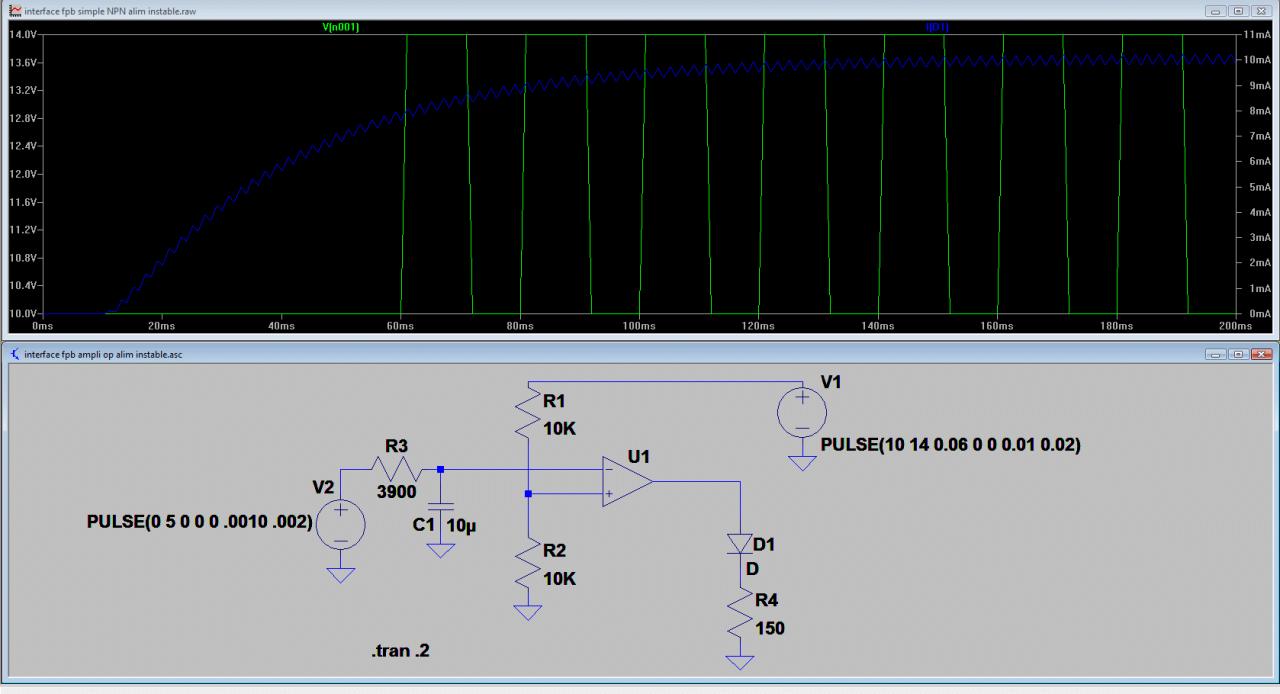
Pour interfacer mon Arduino avec l'alim à découpage je compte utiliser ce montage. V2 représente la sortie de l'Arduino, modulée en PWM à 450 Hz. ( L'alim à découpage hache quant à elle, à 50 KHz)
La courbe rouge au-dessus du schéma représente le courant à travers D1.
Lors de la mise en route de l'alim, on ne doit pas avoir de courant dans la diode, autrement l'alim hoquette, sans arriver à se mettre en route. Dans le montage réel, on a une Zener de 15 V entre la cathode de D et la masse, pour que lors de la mise en route, la tension secondaire de l'alim ne dépasse jamais cette valeur, même en attendant la mise en route de l'Arduino, qui sera alimenté par la sortie de l'alim à découpage. Je n'ai pas représenté cette Zener sur le schéma LTspice.
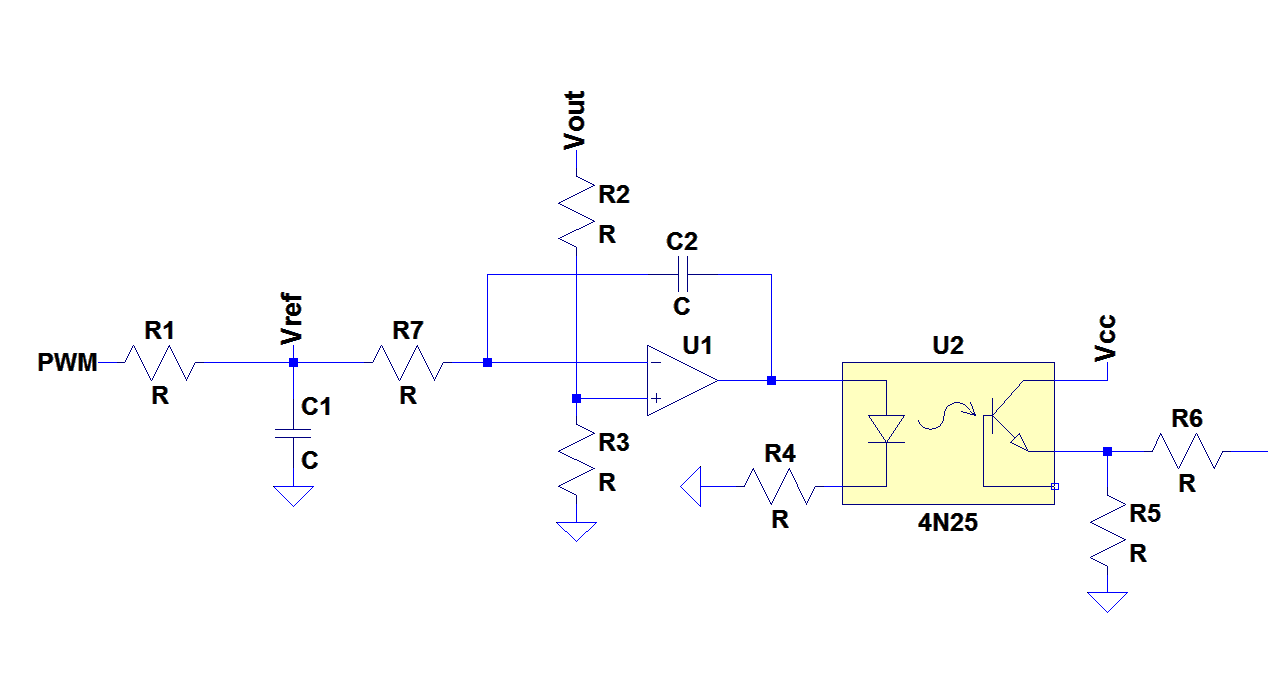
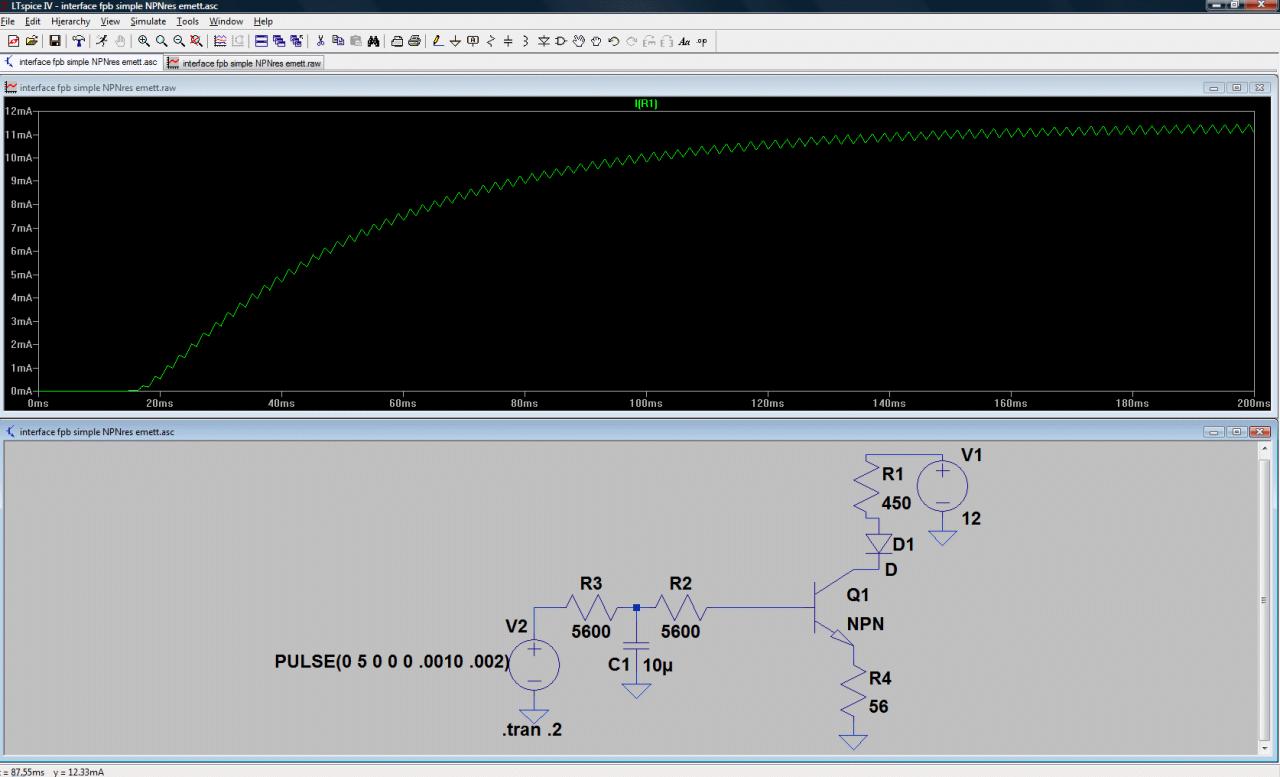
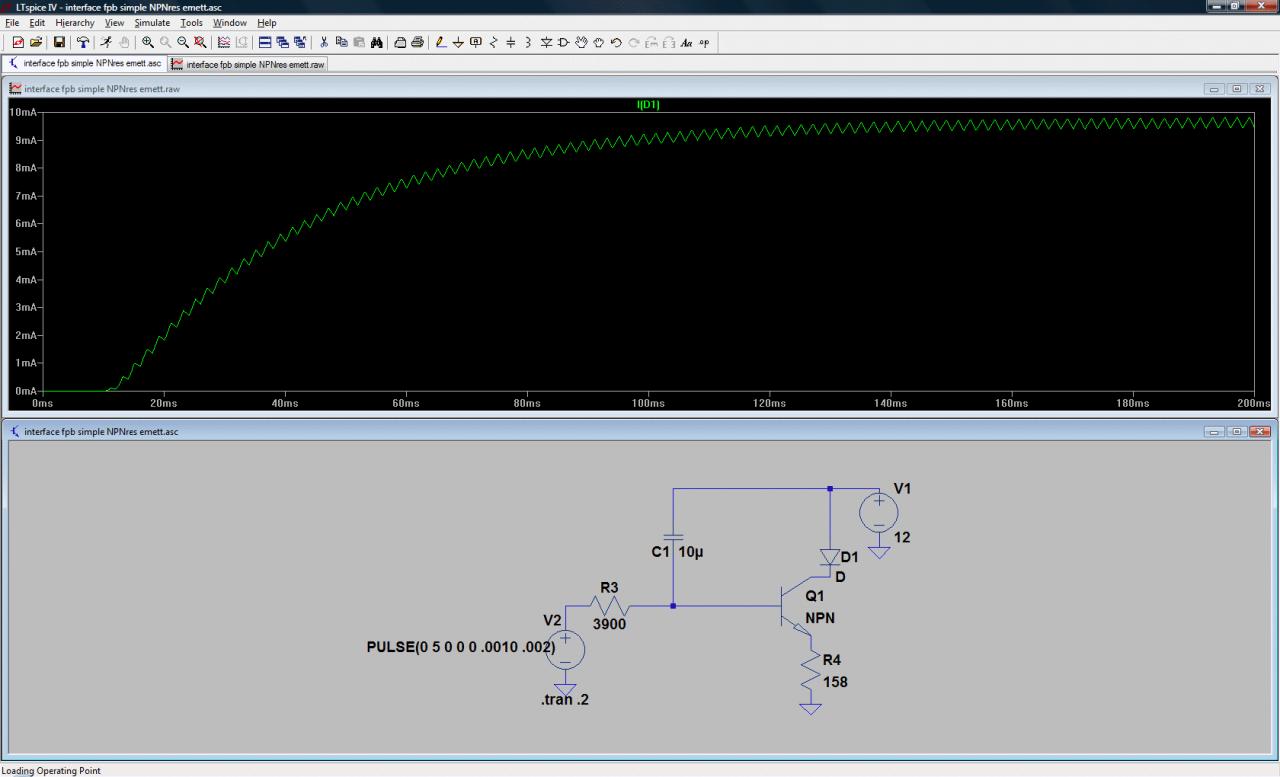
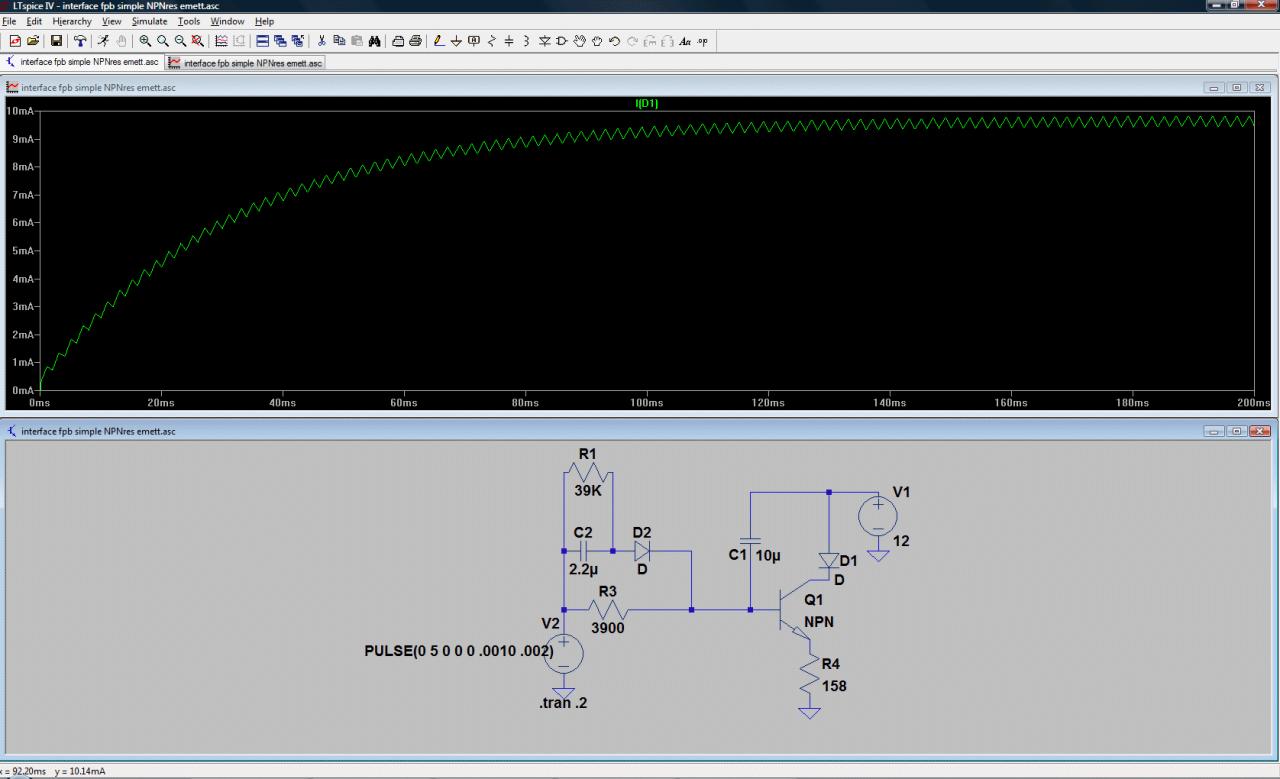
Ma question concerne le circuit à utiliser comme interface entre la sortie PWM de l'Arduino et la diode de l'optocoupleur. J'aimerais que le 450 Hz du PWM de l'Arduino ne se retrouve pas à la sortie de l'alim, c'est pourquoi j'ai utilisé un filtre passe-bas, mais la mise au point (empirique) de celui-ci a été plutôt laborieuse.
Avec ce filtre passe-bas à 5 pôles (!) ça devrait donc marchotter, mais est-ce que l'un d'entre vous aurait l'idée de quelque chose de plus élégant, plus pro, et fonctionnant mieux? Je suis étonné qu'il faille un filtre à 5 pôles. Est-ce que je suis passé à côté de quelque chose?
Merci d'avance,
Bien cordialement,
Yvan
-----





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}