Bonjour,
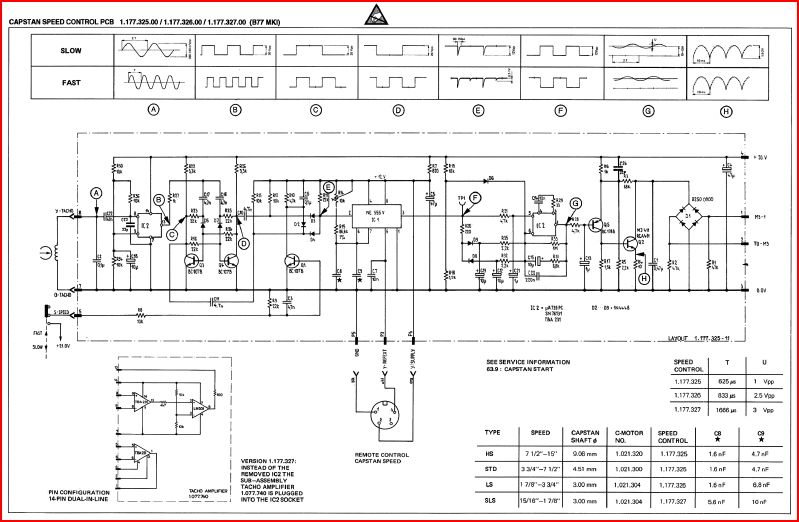
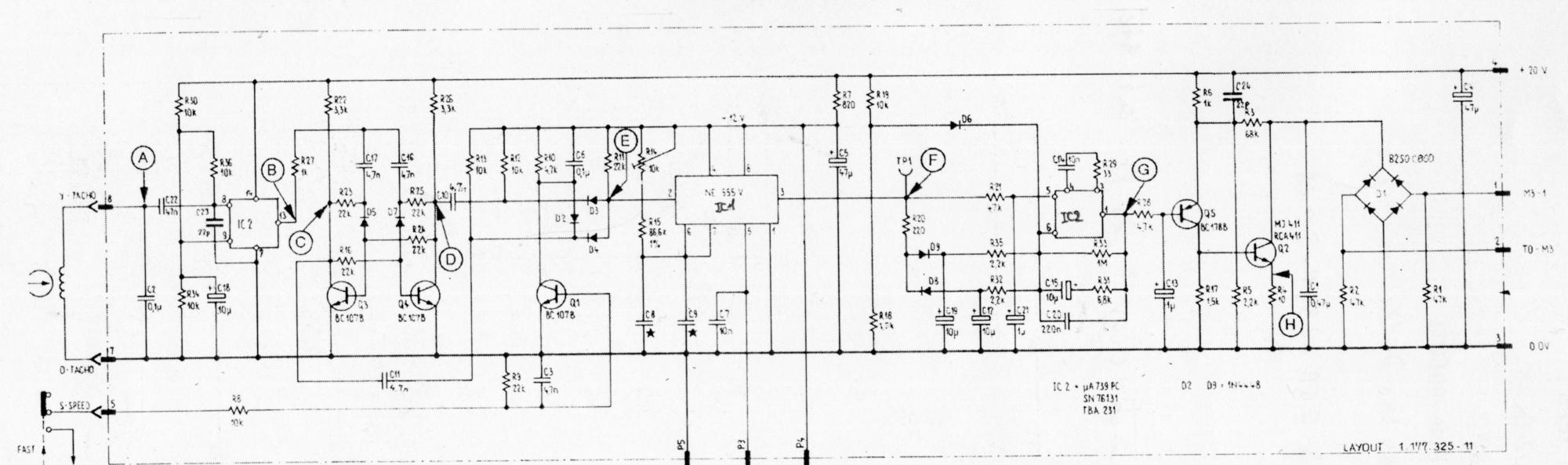
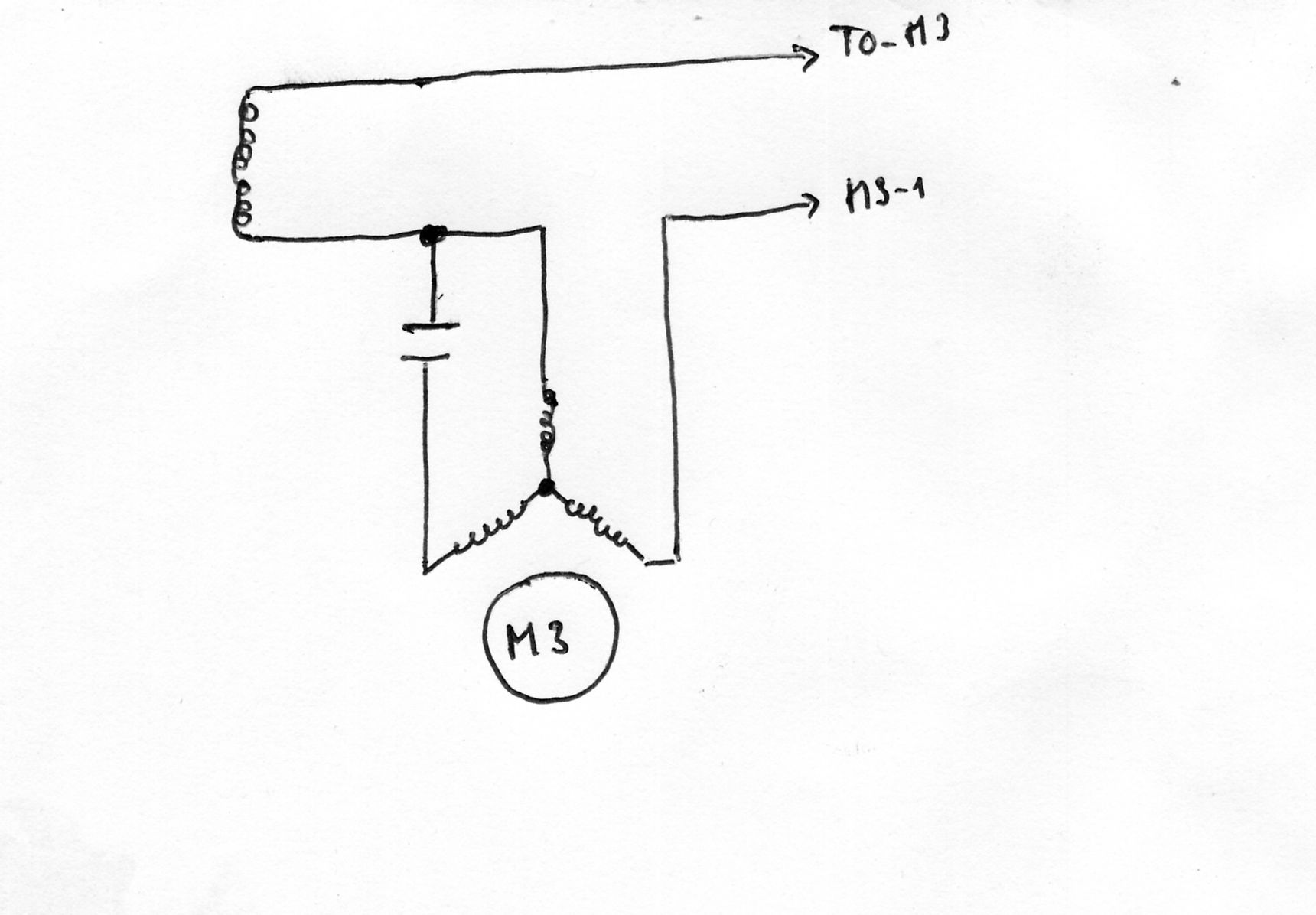
Ci-dessous le schéma du circuit de commande de vitesse du moteur cabestan d'un magnétophone Revox.
Il y a deux vitesses (Fast et Slow).
Jusqu'au point E, ça va c'est clair.
Après E :
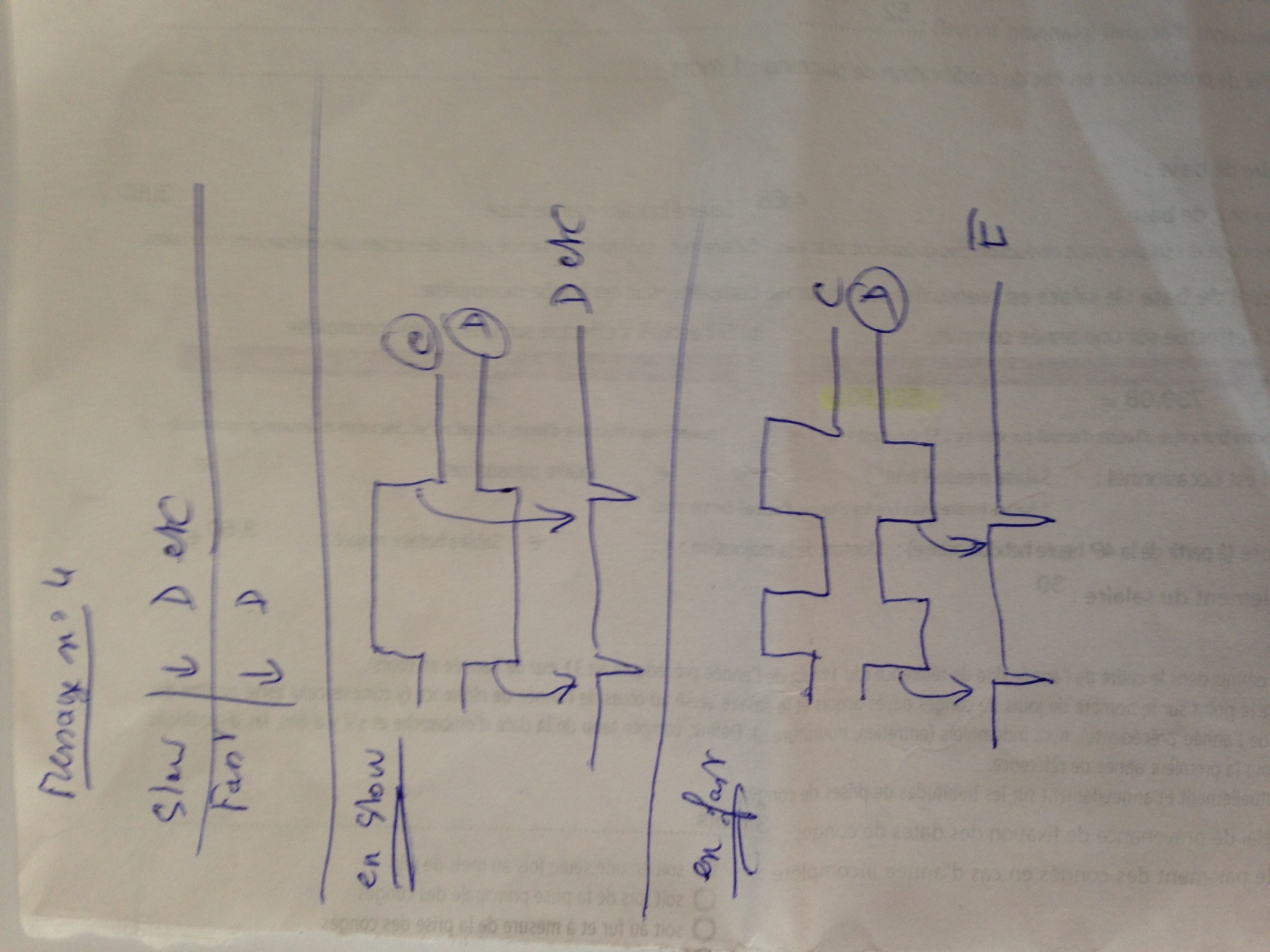
- je ne comprends comment la simple inversion du phase du signal au point F permet d'avoir une vitesse deux fois plus élevée
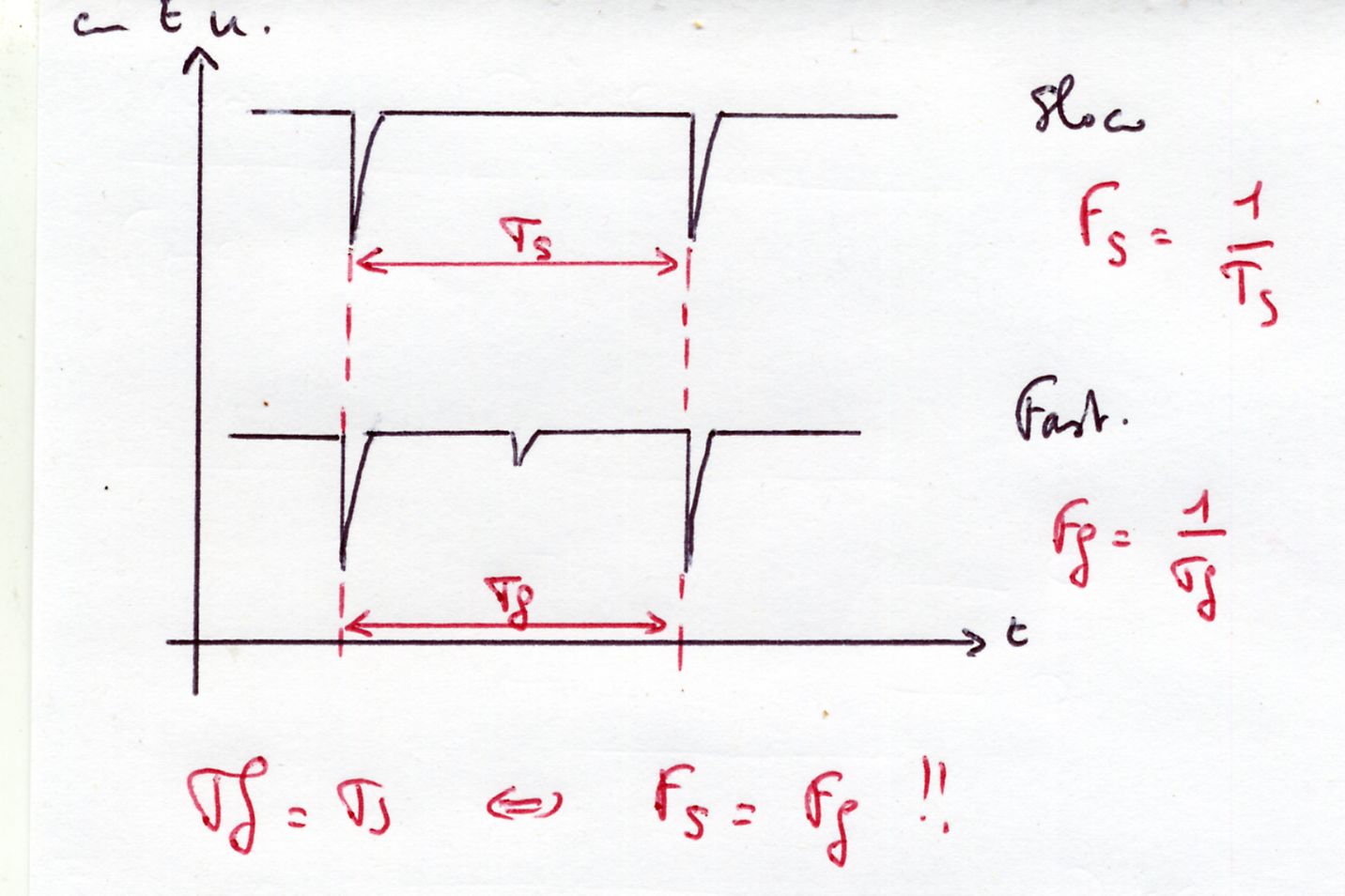
- je comprends encore moins les deux derniers oscillogrammes de la ligne Fast : ils ne diffèrent en rien de ceux de la ligne Slow...
D'avance merci pour votre aide.
Emmanuel
-----
 ).
). Y a des vieux qui savait faire de l'électronique dans les années 80
Y a des vieux qui savait faire de l'électronique dans les années 80 
 je lui souhaite bien du courage.
je lui souhaite bien du courage.