

Bonjour à tous et à toutes,
je fais appel a vous car je suis une débutante sur arduino. Mon projet est de faire tourner simultanément 4 moteurs dont 2 dans un sens horaires et les 2 autres dans un sens anti-horaire pour cela jai mis 2 moteurs sur les pins 2.3.4.5 et 2 autres sur les pins 18.19.20.21, pour cela j'utilise la librairie AccelStepper et Multistepper. J'utilise une arduino méga et des moteurs pas à pas 28BYJ-48 avec leurs drivers. Pour l'instant mon but est de réussir a les faire tourner comme il faut puis après en incluant plusieurs variables la première étant qu'ils devront s'arrêter quand un chariot qui coulisserat sur un rail sera devant un module à un ultrasons.
Voici mon code :
Dont quand je téléverse ce code rien ne se passe par contre j'arrive très bien a faire fonctionner les blocs de 2 moteurs seules ou l'un apreès l'autreCode:#include <AccelStepper.h> ; #include <MultiStepper.h>; int analogPin=0; int analogValue=0; int nombreDePas = 48 * 64; AccelStepper stepper1(nombreDePas,2,3,4,5); AccelStepper stepper2(nombreDePas,18,19,20,21); void setup() { // put your setup code here, to run once: Serial.begin(9600); stepper1.setSpeed(9); stepper2.setSpeed(9); stepper1.setMaxSpeed(180.0); stepper1.setAcceleration(110.0); stepper2 .setMaxSpeed(150.0); stepper2 .setAcceleration(80.0); } void loop() { // put your main code here, to run repeatedly: analogValue=analogRead(analogPin); Serial.println(analogValue); if (analogValue < 400); {stepper1.move(2000); stepper2.move(2000); while ( ( stepper1.distanceToGo() != 0 ) || ( stepper2.distanceToGo() != 0 ) ) // On appel run en boucle stepper1.run(); stepper2.run();} }
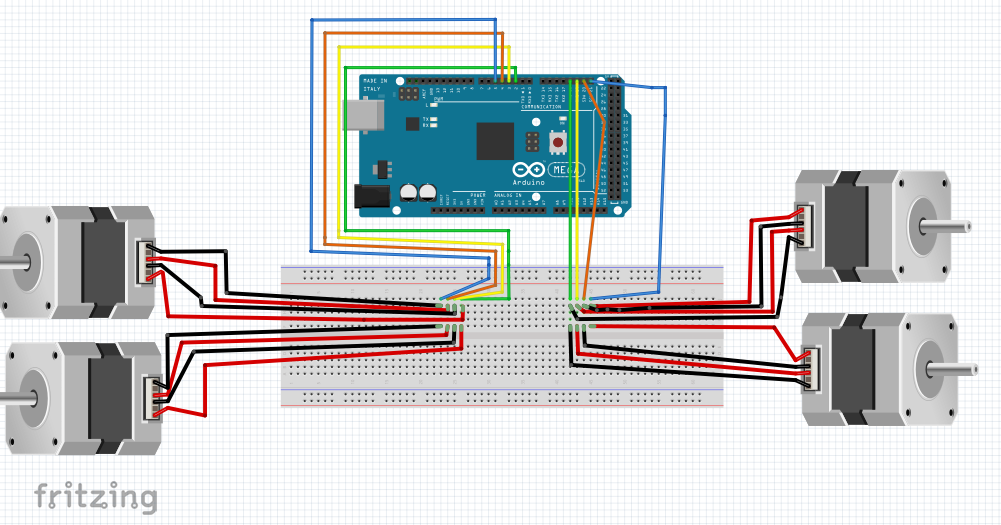
Donc voilà comment est cablé mon shéma.
Merci d'avance de vos réponses.
-----
